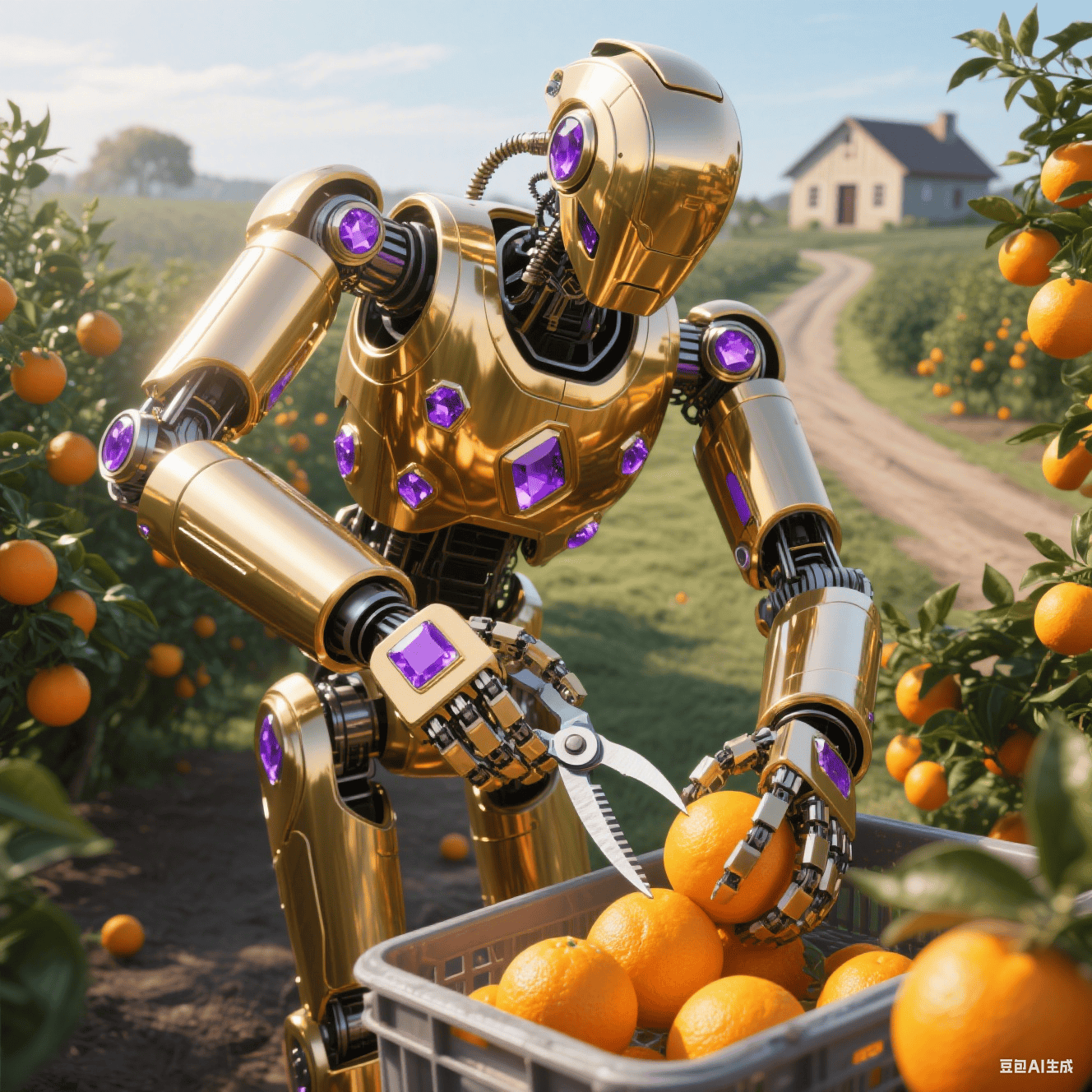
在加州的葡萄園里,晨光初照,一臺四臂機器人靈巧地在藤架間穿梭。它的每一次動作都透露出不同以往的細膩與智慧,這要歸功于Deepoc具身智能開發板的加入。當機器人的視覺傳感器捕捉到西拉葡萄那誘人的紫羅蘭光澤時,它的機械手能以恰到好處的0.1牛力度精準剪斷果梗,避免了對果實的絲毫損傷。更令人驚嘆的是,當檢測到相鄰果實上的露珠時,它會延遲3秒再行采摘,以防果皮破損。果農只需輕聲一句“東區優先采收”,機器人便能即刻調整作業路線,仿佛真的聽懂了人類的語言。
這一變革,源于Deepoc技術的突破,它構建了“視覺-語音-觸覺”的閉環系統。通過多光譜成像技術,機器人能準確識別果實的糖度梯度;抗噪拾音器則讓它能解析各種方言指令;六維力控系統則模擬了人手的力度控制,三者在Deepoc神經中樞板卡內實時協同,賦予了機器人類似果農的感知能力。
Deepoc具身智能開發板的價值,在于它能為傳統采摘設備帶來無創式的智能化升級。通過防水接口,它能輕松兼容主流機型,僅需45分鐘即可完成改造。在智利車厘子農場的實測中,接入Deepoc的采摘機器人將優果率提升至98%,損耗率降至1.2%,成效顯著。
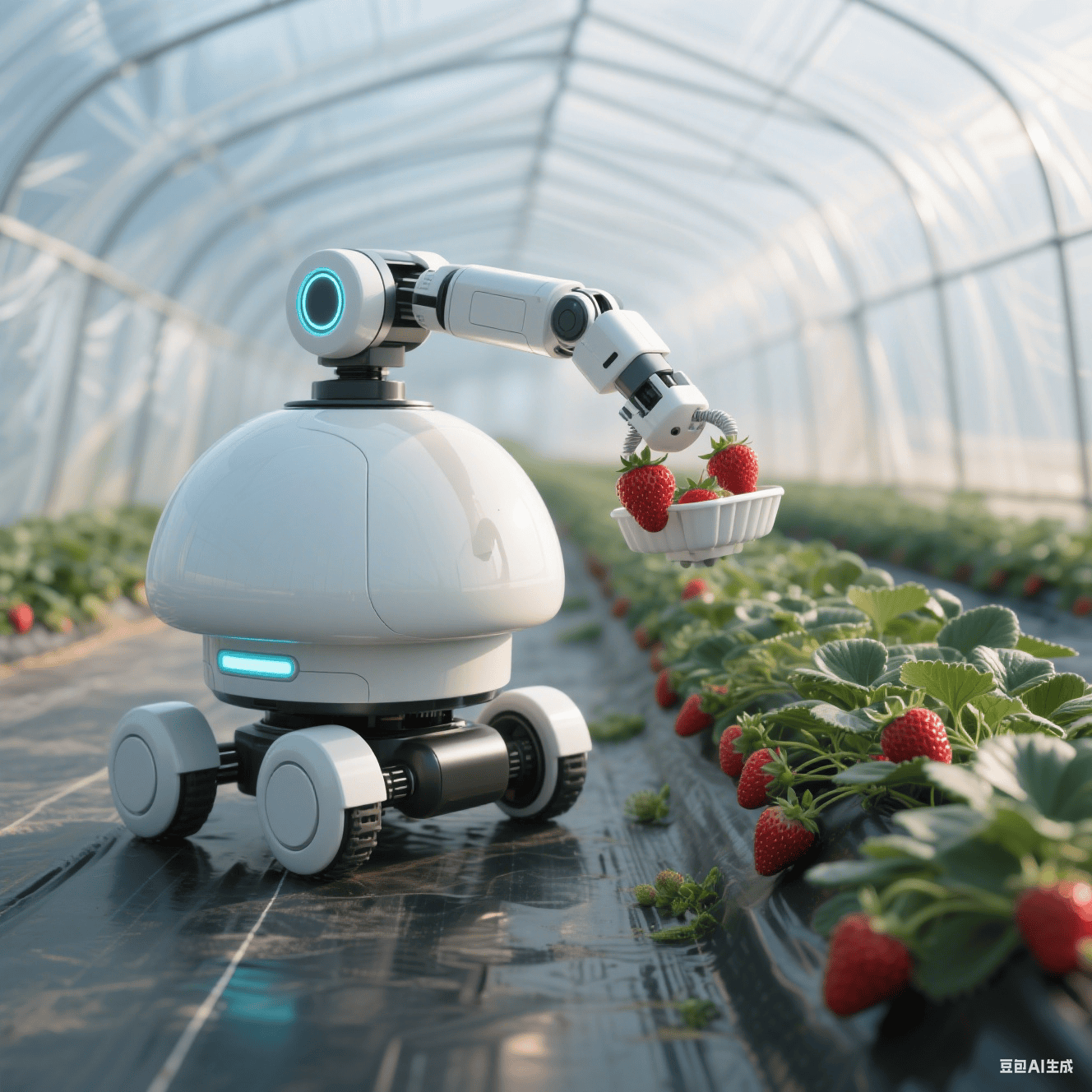
Deepoc不僅提升了采摘機器人的感知能力,更實現了從機械重復到認知協作的范式躍遷。它讓機器人擁有了“生命之眼”,能穿透葉片識別出0.3毫米的蟲蛀孔洞;有了“自然之耳”,能在風機噪音中提取出“保留授粉果”的指令;還有了“觸覺神經”,在采摘草莓時能將力度控制精確到0.05牛。這些進步,使得機器人在面對復雜多變的果園環境時,能做出更加智能和人性化的決策。
在Deepoc的加持下,采摘機器人實現了生命狀態視覺感知、地形動態適應、自然語義翻譯和群體協作優化四大進化。它們能通過近紅外光譜分析藍莓花青素含量,判斷最佳采收時機;能識別坡地自動調整重心,應對復雜地形;能解析果農的自然語言指令,做出相應調整;還能學習果園微氣候規劃采收時序,動態調度設備數量。這一切,都讓采摘機器人的工作變得更加高效和智能。
Deepoc開發板作為采摘機器人的智慧神經,承載著農業革命的核心架構。它同步處理高光譜影像、力學反饋、環境聲紋等多源感知數據,為機器人提供純凈的果園信息流。邊緣決策指揮官則運行輕量級Deepoc引擎,實現實時決策和響應,保障果實零損傷。精密觸覺執行者則控制氣動手指實現力度微調,將Deepoc的每次決策轉化為溫柔的生命觸碰。
Deepoc具身智能開發板正在全球范圍內重塑農業生產。在西班牙橄欖園,老設備改造后采收效率提升了250%;在日本靜岡茶場,機器人通過芽葉分析優化了采摘時序;在云南咖啡莊園,機器人實現了山地的精準采收。這塊僅重190克的板卡,成為了傳統農機通往認知農業的橋梁,讓采摘機器人擁有了“生命感知力”,以最溫柔的方式守護著大地的饋贈。農業革命的本質,或許就是教會這些鋼鐵巨人讀懂果實的語言,讓它們成為果園里真正的溫柔之手。