當(dāng)Waymo的無人車在舊金山街頭日均完成1.4萬單接送任務(wù)時,司機們的評價卻始終帶著一絲調(diào)侃 ——“這車有點楞”。它能精準停在紅燈前,卻讀不懂外賣小哥突然變道的意圖;能在暴雨中識別車道線,卻猜不透前車雙閃背后的緊急狀況。自動駕駛技術(shù)看似已逼近實用門檻,卻始終隔著一層“常識”的窗戶紙。這層窗戶紙的背后,是AI模型從“看見”到“理解”再到“想象”的進化之路,而世界模型(World Model)的出現(xiàn),正讓自動駕駛朝著“老司機”的直覺思維加速邁進。

從“模塊化流水線”到“認知閉環(huán)”
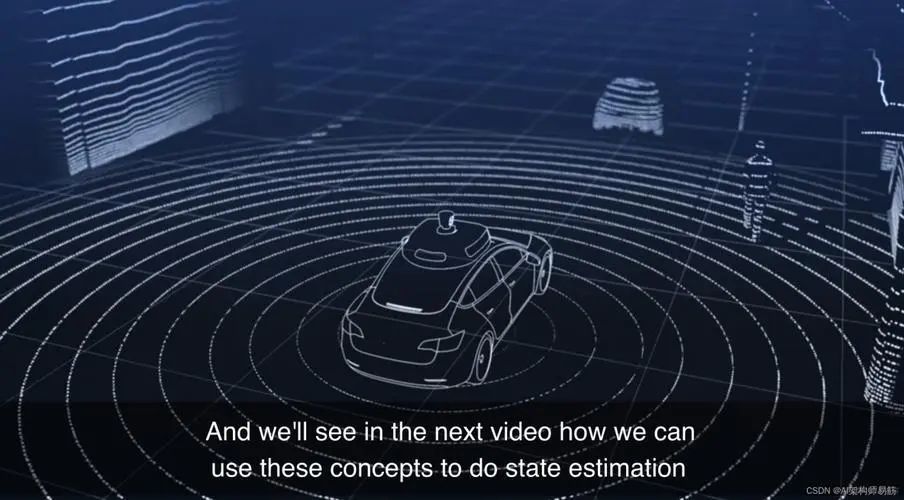
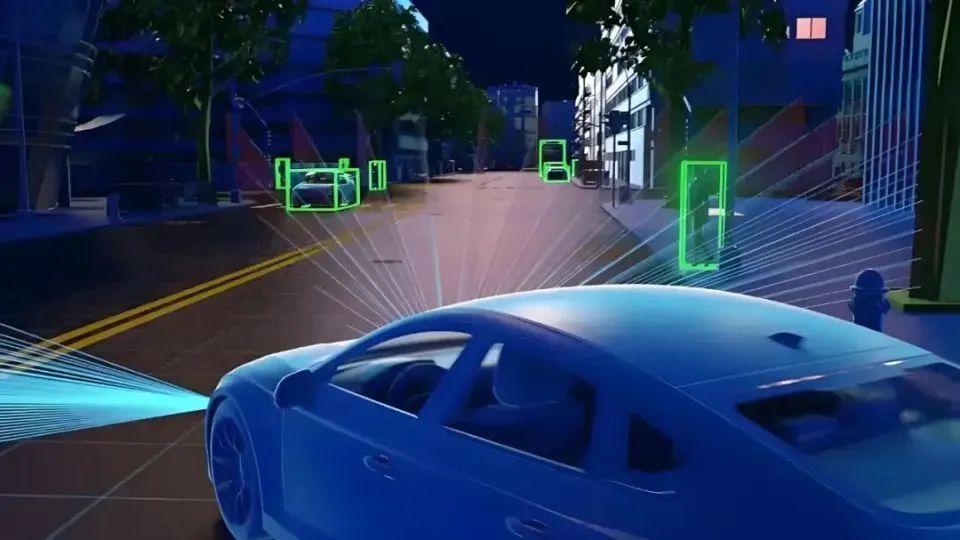
當(dāng)前量產(chǎn)自動駕駛系統(tǒng)的主流架構(gòu),像一條精密運轉(zhuǎn)的 “模塊化流水線”。攝像頭與激光雷達將現(xiàn)實世界拆解成3D點云和2D語義標簽,預(yù)測模塊基于歷史軌跡推算目標下一步動作,最后由規(guī)劃器計算出方向盤轉(zhuǎn)角與油門力度。這種“感知 - 預(yù)測 - 規(guī)劃”的割裂設(shè)計,就像給機器裝上了高精度的眼睛和手腳,卻忘了賦予它思考的大腦。
在復(fù)雜交通場景中,這套系統(tǒng)的短板暴露無遺。當(dāng)紙箱被狂風(fēng)卷起時,它無法預(yù)判落點;當(dāng)小孩在路邊追逐皮球時,它難以想象沖出斑馬線的可能性。問題的核心在于,機器缺乏人類大腦那種“有限觀測→完整建模→未來推演”的認知能力。人類司機看到積水路面會自動減速,不是因為識別了“積水”標簽,而是基于“水膜會降低摩擦系數(shù)”的物理常識 —— 這種對世界運行規(guī)律的內(nèi)在理解,正是當(dāng)前AI最欠缺的能力。
世界模型的突破性意義,在于它構(gòu)建了一個可動態(tài)推演的“數(shù)字孿生大腦”。與傳統(tǒng)模型只處理單次感知-決策不同,它能在內(nèi)部模擬出一個微型世界:輸入當(dāng)前路況和假設(shè)動作,就能生成未來3-5秒的視覺流、激光點云變化,甚至輪胎與地面的摩擦系數(shù)波動。這種“在腦海里預(yù)演”的能力,讓機器第一次擁有了類似人類的“預(yù)判直覺”。例如蘑菇車聯(lián)推出的MogoMind大模型,作為首個物理世界認知AI模型,已在國內(nèi)多個城市的智能網(wǎng)聯(lián)項目中展現(xiàn)出這種特性 —— 通過實時全局感知交通流變化,提前3秒預(yù)判路口沖突風(fēng)險,使通行效率提升35%。
AI 模型的進化樹
純視覺模型:暴力擬合的 “原始直覺”
2016年NVIDIA Dave-2的出現(xiàn),拉開了純視覺自動駕駛的序幕。這個用CNN將攝像頭像素直接映射成方向盤角度的模型,就像剛學(xué)會走路的嬰兒,通過百萬級駕駛片段的“肌肉記憶”來模仿人類操作。它的優(yōu)勢在于結(jié)構(gòu)簡單 —— 僅需攝像頭和低成本芯片,但致命缺陷是“見過即會,沒見過就懵”。當(dāng)遇到訓(xùn)練數(shù)據(jù)外的場景,比如側(cè)翻的卡車、逆行的摩托車時,系統(tǒng)就會瞬間失效。這種“數(shù)據(jù)依賴癥”,讓純視覺模型始終停留在“條件反射”階段。
多模態(tài)融合:增強感知的 “廣角鏡頭”
2019年后,BEV(鳥瞰圖)技術(shù)成為行業(yè)新寵。激光雷達點云、毫米波雷達信號、高精地圖數(shù)據(jù)被統(tǒng)一投射到俯視圖上,再通過Transformer進行跨模態(tài)融合。這種技術(shù)解決了“攝像頭視角盲區(qū)”的物理局限,能精確計算出“左前方30米有行人”的空間位置。但它本質(zhì)上仍是“感知增強”,而非“認知升級”。就像給機器裝上了360度無死角的監(jiān)控攝像頭,卻沒教會它思考“行人拎著鼓起的塑料袋,下一步可能會遮擋視線”。
視覺 - 語言模型:會“說話”的感知器
GPT-4V、LLaVA-1.5 等視覺 - 語言大模型(VLM)的崛起,讓 AI 第一次能 “看圖說話”。當(dāng)看到前車急剎時,它能解釋 “因為有貓竄出”;當(dāng)識別到道路施工時,會建議 “繞行左側(cè)車道”。這種將視覺信號轉(zhuǎn)化為語言描述的能力,看似讓機器具備了 “理解” 能力,但在自動駕駛場景中仍存局限。
語言作為中間載體,必然丟失物理細節(jié) —— 互聯(lián)網(wǎng)圖文數(shù)據(jù)里不會記錄 “濕井蓋摩擦系數(shù)下降 18%” 這種專業(yè)參數(shù)。更關(guān)鍵的是,VLM 的推理基于文本相關(guān)性,而非物理規(guī)律。它可能因為 “暴雨” 和 “減速” 在語料中高度相關(guān)而給出正確決策,卻無法理解背后的流體力學(xué)原理。這種 “知其然不知其所以然” 的特性,讓它難以應(yīng)對極端場景。

視覺-語言-動作模型:從“說”到“做”的跨越
2024年登場的VLA(視覺 - 語言 - 動作模型)邁出了關(guān)鍵一步。NVIDIA VIMA和Google RT-2能直接將“把杯子遞給我”的語言指令,轉(zhuǎn)化為機械臂的關(guān)節(jié)角度;在駕駛場景中,可根據(jù)視覺輸入和語音導(dǎo)航生成轉(zhuǎn)向動作。這種“端到端”的映射跳過了復(fù)雜的中間邏輯,讓AI從“說得出”進化到“做得到”。
但VLA的短板依然明顯:它依賴互聯(lián)網(wǎng)級別的圖文 - 視頻數(shù)據(jù),缺乏對物理世界的微分理解。當(dāng)面對“結(jié)冰路面需要提前3倍剎車距離”這類場景時,基于數(shù)據(jù)統(tǒng)計的模型無法推導(dǎo)出精確的物理關(guān)系,只能依賴相似場景的經(jīng)驗遷移。在千變?nèi)f化的交通環(huán)境中,這種“經(jīng)驗主義”很容易失效。
世界模型:會“想象”的數(shù)字大腦
世界模型與上述所有模型的本質(zhì)區(qū)別,在于它實現(xiàn)了“預(yù)測 - 決策”的閉環(huán)推演。其核心架構(gòu)V-M-C(Vision-Memory-Controller)形成了類似人類大腦的認知鏈條:
Vision模塊用VQ-VAE將256×512的攝像頭畫面壓縮成32×32×8的潛碼,像人類視覺皮層一樣提取關(guān)鍵特征;Memory模塊通過GRU和混合密度網(wǎng)絡(luò)(MDN)存儲歷史信息,預(yù)測下一幀潛碼分布,如同大腦海馬體處理時序記憶;Controller模塊則基于當(dāng)前特征和記憶狀態(tài)生成動作,類似前額葉皮層的決策功能。
這套系統(tǒng)最精妙之處在于“夢境訓(xùn)練” 機制。當(dāng)V和M模塊訓(xùn)練完成后,可脫離實車在云端以1000倍實時速度推演 —— 相當(dāng)于AI在虛擬世界里每天“狂飆”100萬公里,用零成本積累極端場景經(jīng)驗。當(dāng)真實世界遇到類似情況時,機器就能基于 “夢境” 中的預(yù)演做出最優(yōu)決策。
給世界模型裝上“牛頓定律引擎”
世界模型要真正勝任自動駕駛,必須解決一個核心問題:如何讓“想象”符合物理規(guī)律?英偉達提出的“物理 AI”概念,正為世界模型注入“牛頓定律引擎”,讓虛擬推演擺脫“空想”,具備現(xiàn)實指導(dǎo)意義。
神經(jīng)PDE混合架構(gòu)是其中的關(guān)鍵技術(shù)。通過傅里葉神經(jīng)算子(FNO)近似流體力學(xué)方程,模型能實時計算出“雨天輪胎水花飛濺軌跡”“側(cè)風(fēng)對車身姿態(tài)的影響”等物理現(xiàn)象。在測試場景中,裝備該技術(shù)的系統(tǒng)對“積水路面剎車距離”的預(yù)測誤差從30%降至5%以內(nèi)。
物理一致性損失函數(shù)則像一位嚴格的物理老師。當(dāng)模型“幻想”出“2 噸重SUV在0.2秒內(nèi)橫向平移5米” 這種違反慣性定律的場景時,會受到嚴厲懲罰。通過數(shù)百萬次類似糾錯,世界模型逐漸學(xué)會 “腳踏實地”—— 在想象中自動遵守物理法則。
多粒度Token物理引擎更進一步,將世界拆解為剛體、柔體、流體等不同物理屬性的token。當(dāng)模擬“前車掉落床墊”的場景時,模型會同時計算床墊的剛體運動軌跡和空氣流場的推力,最終生成符合空氣動力學(xué)的飄移路徑。這種精細化建模,讓預(yù)測精度提升40%以上。
這些技術(shù)的疊加效果,賦予了自動駕駛“反事實推理”能力 —— 這正是人類老司機的核心競爭力。當(dāng)遇到突發(fā)狀況時,系統(tǒng)能在毫秒級時間內(nèi)模擬“不減速會碰撞”“急打方向會側(cè)翻”等多種可能性,最終選擇最優(yōu)解。傳統(tǒng)系統(tǒng)只能“事后反應(yīng)”,而世界模型卻能“未卜先知”。蘑菇車聯(lián)的MogoMind在這方面已有實際應(yīng)用,其道路風(fēng)險實時預(yù)警功能,能在暴雨天氣提前500米提醒駕駛員前方路段積水風(fēng)險,正是物理規(guī)律建模與實時推理結(jié)合的典型案例。
世界模型的落地三級跳
世界模型從理論走向量產(chǎn),需要跨越“數(shù)據(jù)、算力、安全”三座大山。行業(yè)已形成清晰的落地路線圖,正沿著“離線增強 - 在線學(xué)習(xí) - 端到端控制”的路徑穩(wěn)步推進。
2024 年下半年啟動的“離線數(shù)據(jù)增廣”階段,已顯現(xiàn)出實用價值。國內(nèi)頭部車企利用世界模型生成“暴雨天行人橫穿”“貨車遺撒障礙物”等極端場景視頻,用于訓(xùn)練現(xiàn)有感知系統(tǒng)。實測數(shù)據(jù)顯示,這類corner case的誤報率下降27%,相當(dāng)于給自動駕駛系統(tǒng)打了“疫苗”。
2025年將進入“閉環(huán)影子模式”階段。輕量級Memory模型將嵌入量產(chǎn)車,以每秒5次的頻率“暢想”未來2秒的路況。當(dāng)“想象”與實際規(guī)劃出現(xiàn)偏差時,數(shù)據(jù)會被回傳至云端。這種“邊開邊做夢”的眾包學(xué)習(xí)模式,讓世界模型像人類司機一樣,通過日常通勤持續(xù)積累經(jīng)驗。蘑菇車聯(lián)已在桐鄉(xiāng)部署的全息數(shù)字孿生路口,正是通過實時采集路口300米范圍內(nèi)的交通動態(tài),為世界模型的在線學(xué)習(xí)提供了真實數(shù)據(jù)底座。
2026-2027年的“端到端物理 VLA”階段,將實現(xiàn)質(zhì)的飛躍。當(dāng)車端算力突破 500TOPS、算法延遲降至10毫秒以內(nèi)時,V-M-C全鏈路將直接接管駕駛決策。屆時,車輛不再區(qū)分“感知、預(yù)測、規(guī)劃”,而是像老司機一樣“一眼看穿全局”—— 看到放學(xué)的孩子就自動減速,發(fā)現(xiàn)路面異常就提前變道。英偉達Thor芯片已為此做好硬件準備,其200GB/s的共享內(nèi)存專為Memory模塊的KV緩存設(shè)計,能高效存儲和調(diào)用歷史軌跡數(shù)據(jù)。這種“軟硬件協(xié)同”的架構(gòu),讓世界模型的車端部署從“不可能”變?yōu)椤翱蓪崿F(xiàn)”。
世界模型的“成長煩惱”
世界模型的發(fā)展并非一帆風(fēng)順,正面臨著 “數(shù)據(jù)饑渴”“算力黑洞”“安全倫理” 等多重挑戰(zhàn)。這些 “成長煩惱” 的破解之道,將決定技術(shù)落地的速度與深度。
數(shù)據(jù)瓶頸是最緊迫的問題。訓(xùn)練物理級世界模型需要帶 “速度、質(zhì)量、摩擦系數(shù)” 等標注的視頻數(shù)據(jù),目前只有Waymo、特斯拉等巨頭掌握。開源社區(qū)正試圖復(fù)刻 “ImageNet時刻”—— 清華大學(xué)MARS數(shù)據(jù)集已開放2000小時帶6D位姿的駕駛片段,為中小企業(yè)提供了入場券。
算力成本的高企同樣令人卻步。訓(xùn)練10億參數(shù)的世界模型需千卡A100運行3周,成本超百萬美元。但混合精度訓(xùn)練、MoE架構(gòu)等技術(shù)創(chuàng)新,已將算力需求降低4倍;8位量化推理更讓車端功耗控制在25瓦,為量產(chǎn)鋪平道路。
安全可解釋性的爭議則觸及更深層的信任問題。當(dāng)模型的“想象”與現(xiàn)實不符時,如何界定責(zé)任?行業(yè)共識是采用“保守策略 + 人機共駕”:當(dāng)預(yù)測碰撞概率超過3%時,系統(tǒng)自動降級為輔助駕駛,提醒人類接管。這種“留有余地”的設(shè)計,在技術(shù)完善前筑起安全防線。
倫理邊界的討論則更具哲學(xué)意味。如果模型在虛擬訓(xùn)練中“撞死”數(shù)字行人,是否會形成暴力偏好?MIT研發(fā)的“數(shù)字孿生沙盒” 正試圖解決這一問題 —— 在仿真環(huán)境中預(yù)演“電車難題”等極端場景,通過價值對齊算法確保模型的道德底線。
世界模型重構(gòu)智能的定義
自動駕駛只是世界模型的第一個戰(zhàn)場。當(dāng)AI能在虛擬世界中精準模擬物理規(guī)律、推演因果鏈條時,其影響將輻射到機器人、元宇宙、智慧城市等多個領(lǐng)域。
在家庭服務(wù)場景中,搭載世界模型的機器人能預(yù)判“推倒花瓶會摔碎”,從而調(diào)整動作幅度;在工業(yè)生產(chǎn)中,系統(tǒng)可提前模擬“機械臂抓取高溫零件的熱變形”,避免事故發(fā)生。這些能力的本質(zhì),是AI從“工具執(zhí)行者”進化為“場景理解者”。
更深遠的影響在于對“智能”定義的重構(gòu)。從 CNN 的 “識別” 到Transformer的“關(guān)聯(lián)”,再到世界模型的“想象”,AI正沿著人類認知的進化路徑不斷突破。當(dāng)機器能像人類一樣“在腦海里預(yù)演未來”,智能的邊界將被徹底改寫。
或許五年后的某一天,當(dāng)你的車提前3個路口就規(guī)劃出“零紅燈”路線,當(dāng)機器人主動幫你扶住即將傾倒的咖啡杯時,我們會突然意識到:世界模型帶來的不只是技術(shù)進步,更是一場關(guān)于“機器如何理解世界”的認知革命。