高德地圖近日宣布完成交通視覺語言模型TrafficVLM的重大技術升級,該系統通過整合實時交通孿生體系與多模態AI技術,首次實現了車道級交通態勢的動態感知與預測功能。此次突破標志著導航服務從傳統路徑規劃向空間智能決策的跨越式發展。
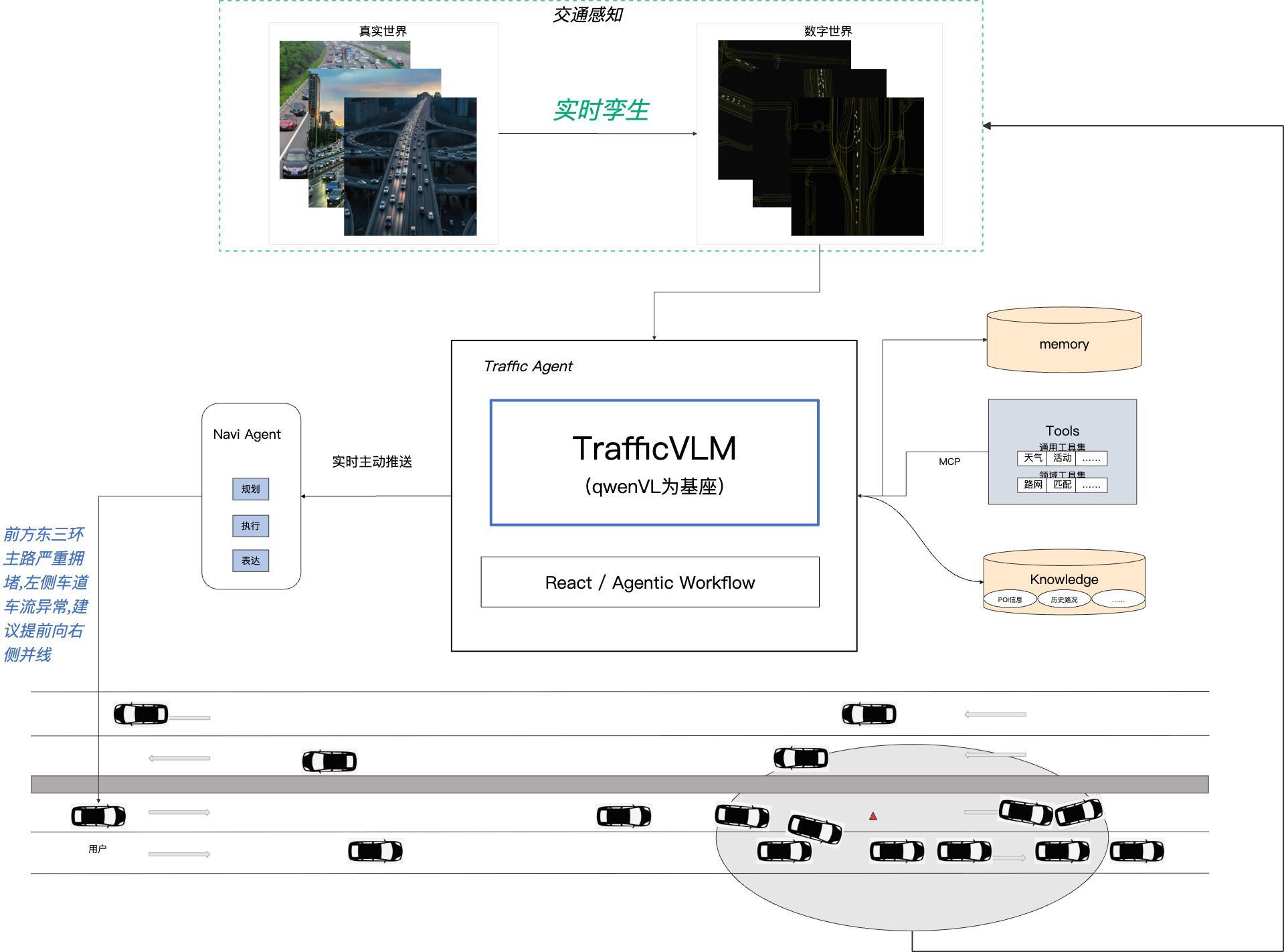
基于阿里云通義Qwen-VL架構開發的TrafficVLM,具備將交通數據流轉化為可視化視頻解析的能力。系統可精準識別車輛變道意圖、擁堵擴散模式等復雜場景,特別在突發事故處理方面,能提前3公里感知路況異常,并通過云端每分鐘更新的推理算法,向用戶推送包含具體車道建議的避險方案。導航界面同步展示三維路況動態,使駕駛者直觀掌握周邊環境變化。
技術團隊透露,該模型通過多模態融合技術,將攝像頭數據、GPS軌跡、歷史擁堵模式等20余類信息源進行實時交叉驗證。在模擬測試中,系統對異常事件的識別準確率較傳統方案提升47%,避讓建議采納率達到82%。目前這項創新功能已全面嵌入高德地圖導航系統,用戶升級至最新版本即可體驗。

行業分析師指出,此次升級重構了出行決策的技術范式。傳統導航依賴離線地圖和簡單路況推送,而TrafficVLM通過持續學習的AI模型,實現了從全局交通態勢感知到個體出行方案生成的完整閉環。這種空間智能技術的落地,或將推動整個地圖行業向預測性、個性化服務轉型。