在上海智能工業中心,一場關于智能科技未來的盛會悄然拉開帷幕。此次,“智馭新篇,賦能未來”青年科學家成果轉化及具身智能高質量發展研修會吸引了眾多目光。
活動現場,來自全國各地的百余位青年科學家與業界領袖齊聚一堂,共同探討智能科技的前沿趨勢。復旦大學信息科學與工程學院知名教授、博士生導師陳濤,以其《超越VLA:新一代生成式人形機器人運動大模型的探索》為題,為與會者帶來了耳目一新的見解。
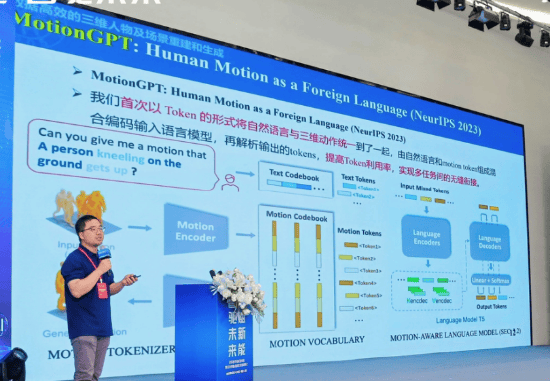
陳濤教授在演講中深刻剖析了當前智能科技領域的研究現狀,指出多數研究仍局限于視覺語言模型(VLA)的傳統框架內。而他帶領的團隊,則勇于突破,開辟了一條全新的研究路徑。他將人體運動的生成巧妙地比喻為語言翻譯的過程,復雜多變的動作序列被視作由“動作詞匯”串聯而成的句子。這一創新性的理念,為團隊早期動作生成大模型的研發奠定了堅實的基礎。
經過不斷的技術迭代與優化,該模型在多個方面取得了顯著突破。它能夠實現對海量多樣化動作的精準控制,僅憑自然語言指令便能生成復雜細膩的肢體動作。更令人矚目的是,陳濤團隊已成功將這一模型應用于實體機器人平臺,展現出驚人的運動能力。
為了解決機器人動作與環境脫節的問題,陳濤團隊再次發力,創新性地研發出三維點云多模態模型。這一技術的誕生,讓機器人能夠真正“理解”空間結構,實現了具身問答、路徑規劃等一系列智能交互功能。面對端側算力受限的瓶頸,團隊又研發出獨特的模型壓縮框架,極大地降低了算力需求,為機器人智能化的普及降低了技術門檻。
基于這些卓越的科研成果,陳濤團隊孵化出了眸深智能科技企業。該企業憑借全球首創的生成式Motion系列技術,在真機部署和模型壓縮領域迅速嶄露頭角,贏得了行業巨頭的廣泛關注與高度認可。
在全球人工智能競爭日益激烈的背景下,陳濤團隊的探索無疑為具身智能的發展注入了新的活力。他們的創新實踐不僅推動了具身智能從理論到實用的跨越,更為全球具身智能產業的蓬勃發展開辟了全新的道路。中國科研力量的崛起,正引領著智能科技領域的未來走向。