人形機器人,這一融合了人類形態(tài)與先進技術(shù)的創(chuàng)新產(chǎn)物,正逐步在工業(yè)、醫(yī)療等多個領(lǐng)域展現(xiàn)其潛力。然而,盡管具備仿人外形、環(huán)境感知及智能決策學習能力,人形機器人的商業(yè)化進程仍面臨諸多挑戰(zhàn),其中運動控制技術(shù)尤為關(guān)鍵。
人形機器人的運動控制涵蓋了硬件與軟件算法兩大方面。硬件部分包括控制器等核心組件,而軟件算法則涉及基于模型的控制方法和基于學習的控制策略。基于模型的控制,如模型預(yù)測控制(MPC)和全身協(xié)調(diào)控制(WBC),具有高可解釋性,但其效果嚴重依賴于模型的精確度。相比之下,基于學習的控制方法,如強化學習和模仿學習,雖能自主學習和優(yōu)化控制策略,但各自存在樣本效率低和數(shù)據(jù)局限性等問題。混合學習方法,作為兩者的結(jié)合,正逐漸成為研究的熱點。
在人形機器人領(lǐng)域,一些頭部企業(yè)如特斯拉、宇樹科技等,憑借出色的運動控制技術(shù)脫穎而出。這些企業(yè)往往自主研發(fā)與運動控制相關(guān)的軟件算法,而在硬件開發(fā)上則分工明確,訓練用的硬件多由第三方專業(yè)公司提供。這種合作模式不僅加速了技術(shù)創(chuàng)新,也推動了人形機器人技術(shù)的整體進步。
在人形機器人的運動控制技術(shù)上,軟件算法的優(yōu)化尤為關(guān)鍵。強化學習通過不斷試錯來尋找最優(yōu)策略,雖然能夠自主學習,但樣本效率低下成為其一大瓶頸。模仿學習則通過演示數(shù)據(jù)來學習控制策略,雖然學習效率相對較高,但數(shù)據(jù)的局限性和泛化能力仍是其面臨的挑戰(zhàn)。混合學習方法,通過結(jié)合強化學習和模仿學習的優(yōu)勢,有望在解決這些問題上取得突破。

人形機器人的廣泛應(yīng)用,離不開運動控制技術(shù)的持續(xù)進步。未來,隨著算法的不斷優(yōu)化和硬件性能的提升,人形機器人將在更多領(lǐng)域發(fā)揮其獨特優(yōu)勢。無論是工業(yè)生產(chǎn)中的自動化操作,還是醫(yī)療領(lǐng)域的輔助護理,人形機器人都將展現(xiàn)出更加卓越的性能和更加廣泛的應(yīng)用前景。
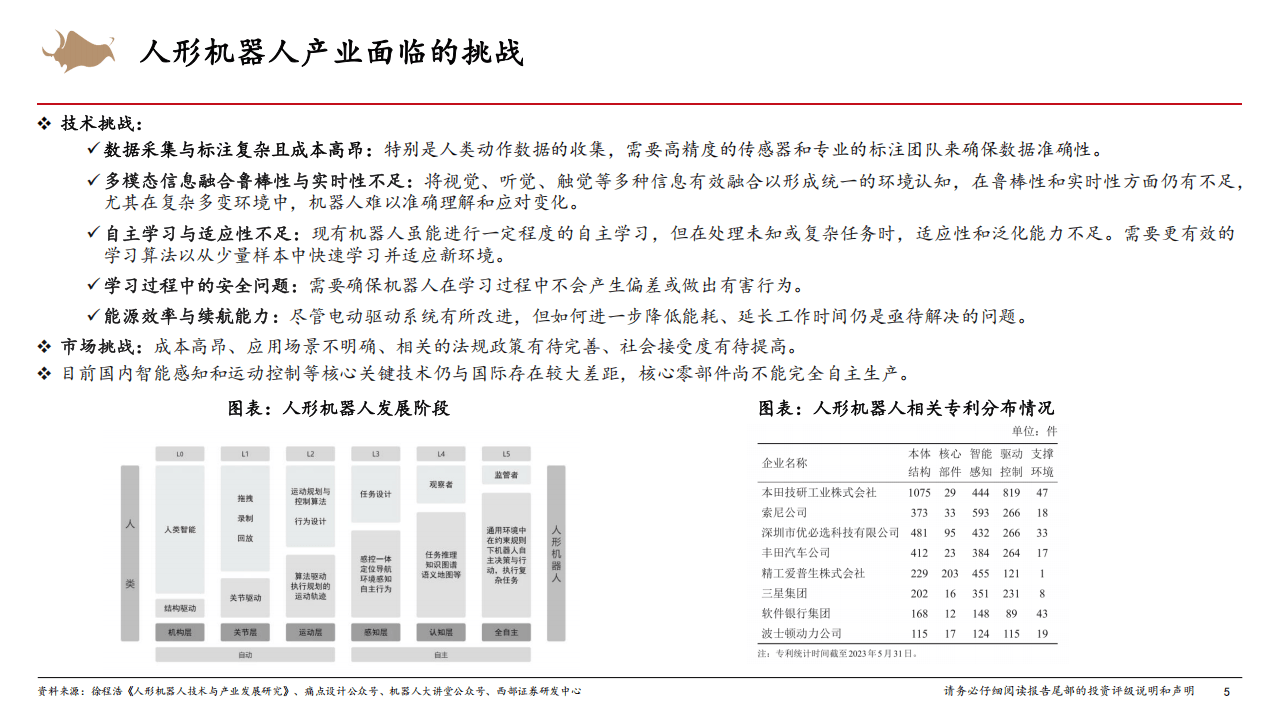
盡管國內(nèi)在人形機器人核心技術(shù)方面與國際先進水平仍存在差距,但通過持續(xù)的技術(shù)創(chuàng)新和合作研發(fā),我們有理由相信,人形機器人將在不遠的將來實現(xiàn)更加廣泛的商業(yè)化應(yīng)用,為人類社會的發(fā)展貢獻更多力量。