在六月的科技浪潮中,零次方機器人公司宣布了一項重大創新突破,正式推出了“全模態”具身數據全鏈路解決方案,標志著國內首家成功實現專項場景超長序列多任務連貫操作的機器人企業再次引領行業前行。
該方案直擊具身智能模型訓練中的痛點,如數據模態缺失、采集流程繁瑣、任務數據管理復雜以及模型訓練推理部署門檻高等問題。零次方提出的解決方案覆蓋了從“全模態”數據采集設備、數據采集與管理平臺、模型訓練到模型推理的全方位流程。
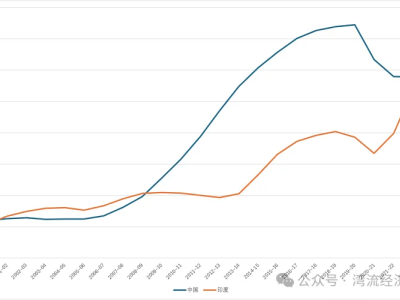
該方案的設計著眼于未來3-5年內具身數據的需求,緊跟技術發展趨勢。當前,具身智能模型技術正處于快速發展階段,各研究團隊正積極探索更豐富的數據模態。零次方指出,當前的技術路線主要包括視覺-關節融合、語義-視覺-關節融合、視覺-關節-力聯合建模等,而更全面的模態架構正逐漸成為新趨勢。
在此背景下,零次方機器人數據采集中心的全模態數據架構展現出了兩大核心優勢:一是維度兼容性,能夠自然降維生成任意子模態數據集,兼容現存所有算法范式的訓練需求;二是價值持續性,預設傳感器冗余通道,集成工具標注對齊多模態數據流,為未來可能出現的VLA、跨模態對齊、物理因果推理等具身模型提供數據支持。
為了實現這一前瞻性設計,零次方推出了“全模態”數據采集人形機器人ZERITH-H1。該機器人采用了高度擬人化的上肢結構設計,關節自由度布局嚴格參照人體工學,顯著擴展了關節活動范圍,實現了超越成年男性的靈活操作空間。
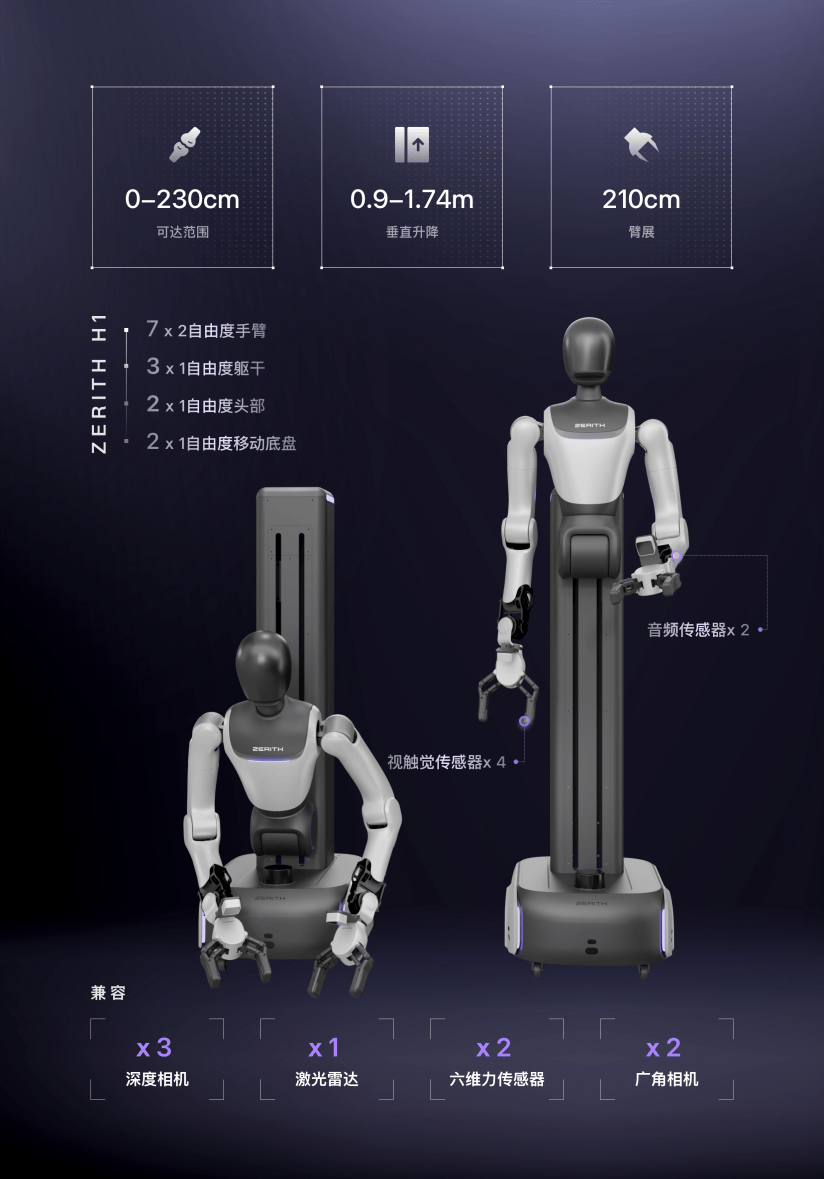
ZERITH-H1在設計階段即整合了各種模態的傳感器,能夠實現對二維視覺信息、三維空間信息、關節信息、力觸覺信息以及聲音信息的全面采集。特別是其觸覺夾爪,集成了高分辨率視觸覺傳感器,實現了對抓取力觸覺的精準感知。

為了滿足實時同步操作的需求,零次方還推出了低延遲、高動態響應的遙操系統,實現了機器人與采集者之間的“孿生式”映射同步感知。同時,整體設備連續運行時間超過4小時,滿足了長時間不間斷的數據采集需求。
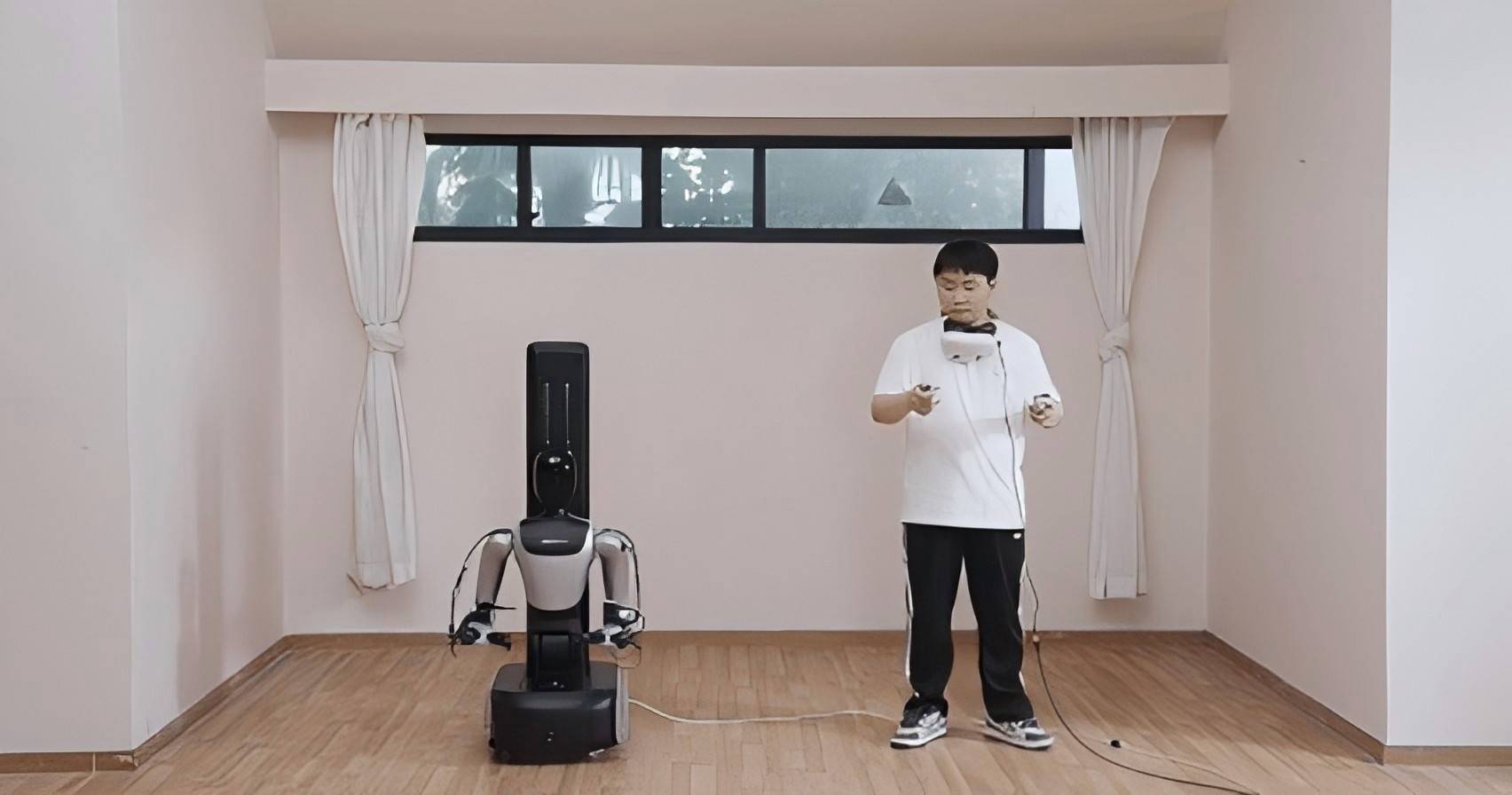
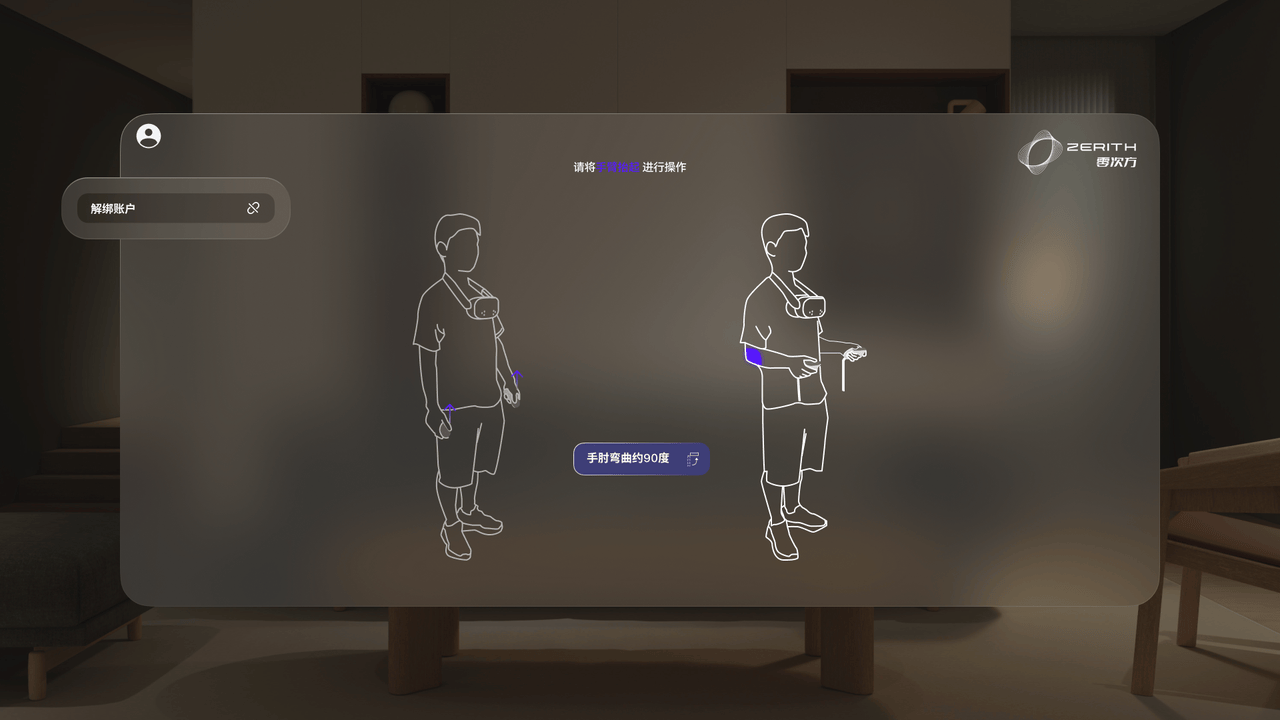
零次方還自研了ZERITH-VR APP,基于主流VR設備,實現了遙操作設備與機器人本體、具身數據管理平臺之間的超低數據傳輸延時。通過“一鍵式”設備連接和“引導式”數據采集工作流,用戶可以快速掌握復雜任務數據采集能力,確保數據收集質量并提升采集效率。
為了應對數據采集任務多樣、采集流程繁雜等挑戰,零次方還自研了具身數據采集管理平臺,用于數據全流程管理。該平臺具有模塊化、高易用性的特點,能夠對具身任務數據進行分類、清洗、標注和檢索等操作。
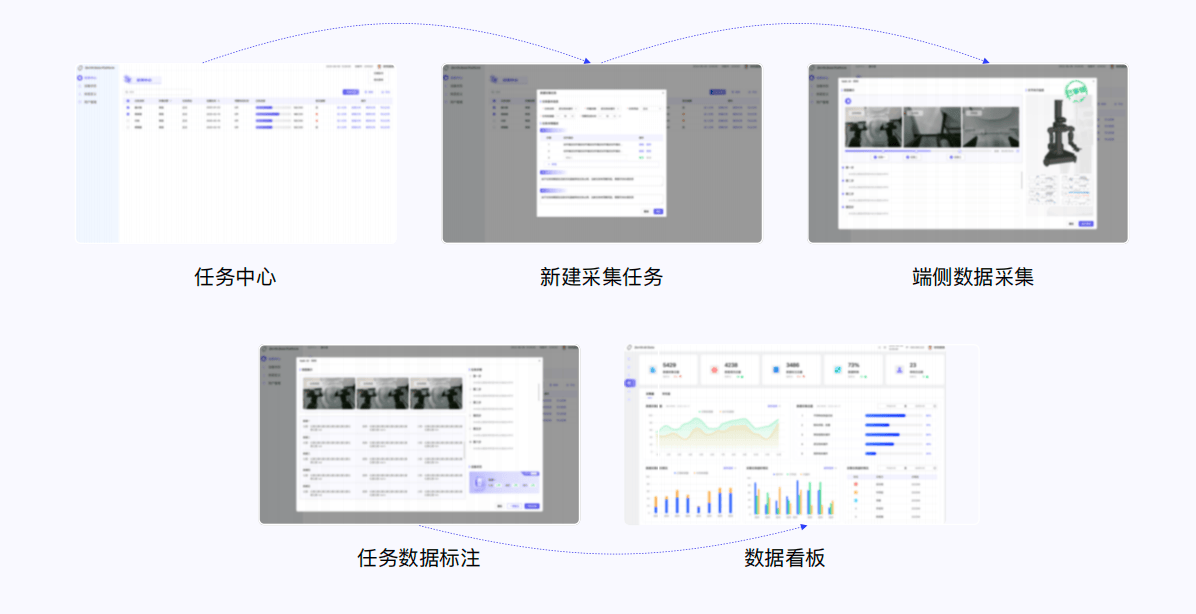
在模型訓練和推理方面,零次方深度集成了AI訓練工具Swanlab,實現了對模型訓練的全過程記錄、實時監控和數據可視化。同時,平臺兼容主流開源算法框架和基座模型的后訓練接口,提供了符合許可證要求的快速訓練接入能力。在模型推理上,機器人最高可選配500TOPS算力主機,實現了絲滑動作執行和真實場景落地效果。