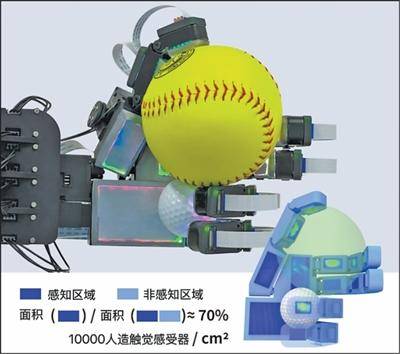
在北京通用人工智能研究院的實驗室深處,一場關于機器人仿生手技術的革命正在悄然上演。一只形態逼真、動作靈活的機器人手,正展示著其驚人的能力:它不僅能夠穩穩握住瓶子,還能同時精準地捏起一顆高爾夫球,準確無誤地將其送至指定位置。
這項技術的核心在于“F—TAC Hand”機器人仿生手,它首次實現了類人水平的自適應抓取能力。據北京通用人工智能研究院研究員劉騰宇介紹,該仿生手掌面70%的面積集成了高分辨率觸覺感知,使得它能夠像人類一樣,通過觸覺反饋進行精細操作。這一突破性的成果,由我國北京通用人工智能研究院、北京大學以及英國倫敦大學瑪麗女王學院聯合研究完成,并在《自然·機器智能》期刊上發表。
對人類手部功能的研究,一直是具身智能與機器人領域的熱點。劉騰宇進一步解釋,人類拿取物體時,涉及觸覺反饋與運動功能兩大能力。而在以往的研究中,如何將這兩者完美整合,一直是機器人研究的關鍵挑戰之一。此次“F—TAC Hand”的成功,正是對這一挑戰的有力回應。
為了賦予機械手“觸覺”,研究團隊在真實人手比例的機械手中成功嵌入了17個視觸覺傳感器。研究員李皖林透露,這些傳感器由多色光源、柔性鍍膜硅膠體、剛性支撐件、微型攝像頭和傳感器板構成,形成了模塊化的設計。當記者用鋼筆按壓機械手時,后臺的電腦屏幕上立刻顯示出精確的接觸位置、壓力分布以及鋼筆的紋理信息。
為了實現所有傳感器的同步工作,研究團隊還設計了一套多相機圖像同步采集系統。研究員王濛表示,這些傳感器既是感知元件又是結構部件,在不犧牲手部靈活性的前提下,實現了前所未有的觸覺覆蓋范圍。這一設計,無疑為機械手增添了更加敏銳的“觸覺神經”。
在運動控制方面,“F—TAC Hand”采用了繩驅方式,通過五根腱繩沿手指兩側布線,分別控制五指的屈伸動作。同時,關節內置扭簧結構,使得腱繩松弛時能夠自動復位。這一設計使得機器人仿生手能夠實現總計15個自由度與10牛頓的握力,更加接近人類手部的運動能力。
為了進一步提升機器人手的抓取能力,研究團隊還開發了一種基于概率模型的算法,能夠產生與人類非常相似的抓取方式。實習生李宇飏介紹,該算法涵蓋了人類常見的19種抓取類型,使得“F—TAC Hand”在面對復雜環境時表現出更強的適應性。與沒有觸覺反饋的系統相比,“F—TAC Hand”在執行任務時的平均成功率從53.5%提升至100%。
北京通用人工智能研究院院長、北京大學人工智能研究院院長朱松純表示,這一研究成果不僅驗證了全手高分辨率感知與手部運動功能的兼容性,還為探索復雜的觸覺具身智能開辟了新的道路。他強調,這一成果為豐富感官反饋在智能行為中的關鍵作用提供了有力證據,并為超越純計算方法的具身人工智能系統發展作出了方向性探索。