近期,同濟大學等機構的研究團隊在《汽車工程》雜志2025年第5期中發表了一項引人注目的研究成果,聚焦于狹窄環境下的安全泊車路徑規劃算法。該研究針對自動泊車系統面臨的安全、實時性和可行性挑戰,提出了一種創新的解決方案。
隨著城市車輛密度的不斷增加,狹窄擁擠的泊車環境成為駕駛者的一大困擾。自動泊車系統通過智能感知和自主規劃路徑,為解決這一問題提供了希望。然而,安全高效的泊車路徑規劃技術仍然面臨諸多難題,包括在復雜場景下的無碰撞路徑規劃、實時性不足以及路徑可執行性差等問題。現有的路徑規劃方法,如幾何曲線法、啟發式搜索和強化學習,各有優缺點,但難以滿足狹窄、不確定性泊車場景的需求。
為了克服這些挑戰,研究團隊開發了一種基于混合動作空間約束強化學習(HCRL)的泊車路徑規劃算法。該算法將泊車的最優安全路徑規劃問題轉化為混合動作空間的安全策略優化問題,通過結合離散動作和連續參數,實現了滿足車輛運動學特性的參數化軌跡規劃,從而提高了路徑的可執行性。
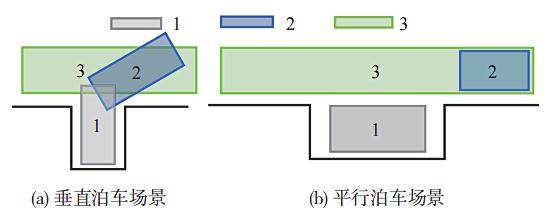
在算法設計中,研究團隊還引入了一種課程學習機制,通過逐步增加泊車難度來引導策略更新。這一機制不僅提高了模型訓練的穩定性,還顯著加快了算法的收斂速度。為了驗證算法的有效性,研究團隊在垂直車位和平行車位上進行了廣泛的對比和消融實驗。
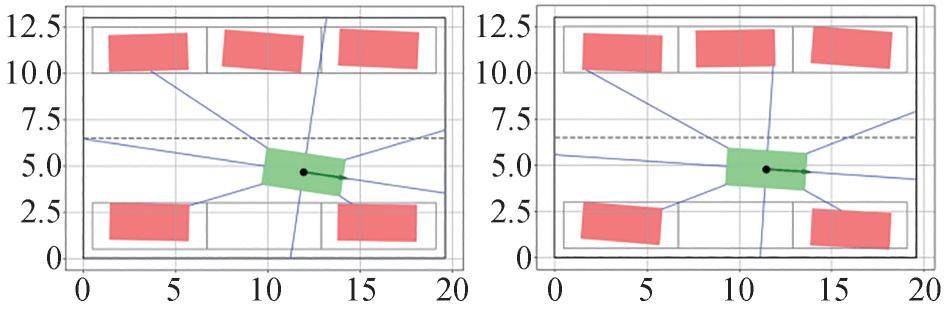
實驗結果表明,所提出的HCRL算法在成功率、安全性和實時性等關鍵指標上均表現出色,綜合性能明顯優于現有的基線算法。特別是在狹窄車位場景下,HCRL算法仍然能夠完成安全、高效的泊車路徑規劃。通過與常用泊車路徑規劃算法的對比,HCRL算法所規劃的路徑不僅完美避開了周圍停泊的車輛,還以較短的時間完成了整條路徑的規劃。
為了進一步展示HCRL算法的優勢,研究團隊還進行了消融實驗,分別測試了安全約束策略和課程學習對算法性能的影響。實驗結果表明,安全約束策略和課程學習在HCRL算法中均發揮著關鍵作用,兩者的結合使得算法能夠以更高的成功率和更低的安全成本完成泊車任務。

這一研究成果不僅為狹窄環境的安全泊車路徑規劃提供了理論支持和技術保障,還具有重要的實際應用價值。隨著自動泊車技術的不斷發展,HCRL算法有望在未來得到廣泛應用,為駕駛者提供更加便捷、安全的泊車體驗。