在硬件技術(shù)的迅猛推動(dòng)下,四足機(jī)器人在動(dòng)力與速度領(lǐng)域取得了顯著進(jìn)步。尤其是強(qiáng)化學(xué)習(xí)等先進(jìn)技術(shù)的應(yīng)用,極大地增強(qiáng)了這些機(jī)器人在復(fù)雜環(huán)境中的移動(dòng)控制穩(wěn)定性。這一進(jìn)展使得四足機(jī)器人在物資運(yùn)輸、環(huán)境探索等自動(dòng)化任務(wù)中展現(xiàn)出了巨大的應(yīng)用潛力。
然而,面對(duì)地形復(fù)雜、地勢(shì)起伏劇烈的環(huán)境,四足機(jī)器人往往需要具備垂直移動(dòng)的能力。例如,在災(zāi)難現(xiàn)場(chǎng)或未開發(fā)的自然環(huán)境中,倒塌的建筑物和巖石構(gòu)成了高度變化極大的障礙。遺憾的是,現(xiàn)有的四足機(jī)器人大多擅長水平移動(dòng),而專為垂直移動(dòng)設(shè)計(jì)的機(jī)器人則因結(jié)構(gòu)過于特殊,在水平移動(dòng)時(shí)顯得笨拙。因此,能夠穩(wěn)定完成這類動(dòng)作的機(jī)器人及其控制方法仍處于發(fā)展階段。
近日,東京大學(xué)的Keita Yoneda研究團(tuán)隊(duì)成功研發(fā)出一款名為KLEIYN的四足機(jī)器人,該機(jī)器人在垂直攀爬方面取得了突破性進(jìn)展。KLEIYN的核心亮點(diǎn)在于其配備的主動(dòng)腰部關(guān)節(jié),這一設(shè)計(jì)顯著提升了機(jī)器人在狹窄墻壁上的跟蹤能力和攀爬性能。通過創(chuàng)新的課程學(xué)習(xí)(Contact-Guided Curriculum Learning)方法,研究團(tuán)隊(duì)引導(dǎo)機(jī)器人逐步掌握了攀爬技巧,實(shí)現(xiàn)了水平移動(dòng)與垂直攀爬的完美結(jié)合。

實(shí)驗(yàn)結(jié)果顯示,KLEIYN能夠成功攀爬寬度在800毫米至1000毫米之間的墻壁,并以平均150毫米/秒的速度進(jìn)行。與傳統(tǒng)同類機(jī)器人相比,KLEIYN的速度提升了近50倍,這一突破無疑為四足機(jī)器人在復(fù)雜環(huán)境中的應(yīng)用開辟了新道路。
KLEIYN之所以能夠?qū)崿F(xiàn)既能在平地穩(wěn)健行走,又能在高墻靈活攀爬,關(guān)鍵在于其腰部關(guān)節(jié)的創(chuàng)新設(shè)計(jì)。這款機(jī)器人體重18千克,體長760毫米,站立高度400毫米,緊湊的體型為其在狹窄空間內(nèi)的靈活活動(dòng)提供了基礎(chǔ)。全身共有13個(gè)自由度(DOF),每條腿3個(gè)自由度,軀干部分1個(gè)自由度,使其既能完成基礎(chǔ)動(dòng)作,又能適應(yīng)復(fù)雜地形。
在腿部結(jié)構(gòu)上,KLEIYN借鑒了開源金屬四足機(jī)器人MEVIUS的優(yōu)勢(shì),每條腿包含肩胛骨連桿、大腿連桿和小腿連桿三個(gè)部分,通過關(guān)節(jié)連接。所有腿部關(guān)節(jié)均由減速比為1:10的電機(jī)驅(qū)動(dòng),最大扭矩可達(dá)25牛米,為行走和攀爬提供了充足動(dòng)力。軀干部分則包括前體連桿和后體連桿,兩者結(jié)構(gòu)相同,內(nèi)部容納了車載電腦、電池等核心部件。連接這兩部分的腰部關(guān)節(jié)可沿俯仰軸旋轉(zhuǎn),使軀干實(shí)現(xiàn)彎曲動(dòng)作,為機(jī)器人在狹窄墻壁間的攀爬提供了關(guān)鍵靈活性。
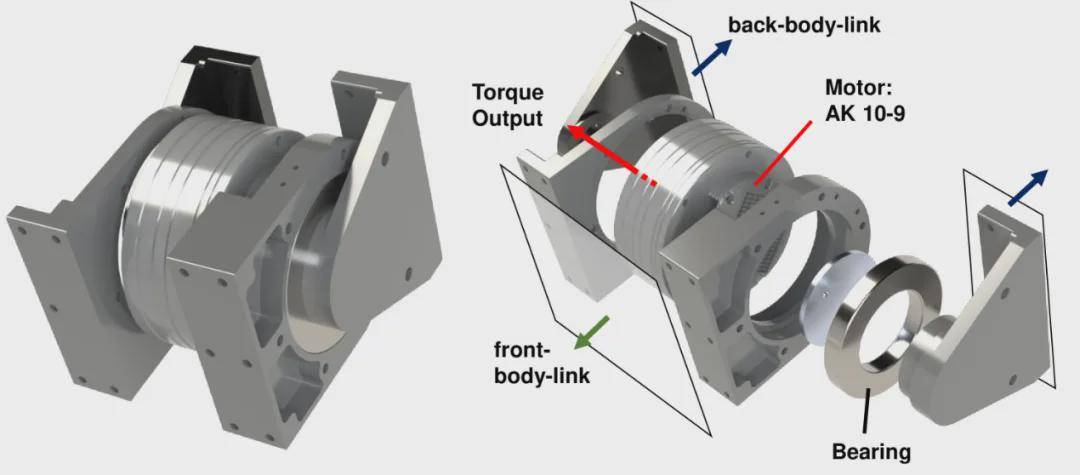
KLEIYN的腰部關(guān)節(jié)采用單自由度旋轉(zhuǎn)結(jié)構(gòu),框架由精密加工的鋁材制成,并通過預(yù)仿真應(yīng)力分析驗(yàn)證了強(qiáng)度。為增強(qiáng)剛性,關(guān)節(jié)采用雙支撐結(jié)構(gòu),在電機(jī)輸出軸的對(duì)側(cè)設(shè)置軸承分擔(dān)負(fù)載。電機(jī)輸出通過1:9的低減速比齒輪以準(zhǔn)直接驅(qū)動(dòng)方式傳遞到旋轉(zhuǎn)軸,保證了動(dòng)力傳輸?shù)母咝裕檎n程學(xué)習(xí)中的“仿真到現(xiàn)實(shí)”遷移提供了便利。為滿足攀爬場(chǎng)景中承受左右腿合力的需求,腰部關(guān)節(jié)還配備了最大扭矩48牛米的電機(jī),確保在負(fù)載集中時(shí)也能穩(wěn)定支撐機(jī)身完成動(dòng)作。
依托創(chuàng)新的課程學(xué)習(xí)控制策略,KLEIYN從零基礎(chǔ)逐步掌握了高難度的攀爬技能,并能靈活應(yīng)對(duì)不同場(chǎng)景的挑戰(zhàn)。其核心采用“Actor-Critic”架構(gòu),訓(xùn)練時(shí)執(zhí)行者輸出動(dòng)作,評(píng)估者評(píng)估動(dòng)作優(yōu)劣并優(yōu)化策略;實(shí)際作業(yè)時(shí)僅啟動(dòng)執(zhí)行者,以50Hz頻率精準(zhǔn)控制關(guān)節(jié)運(yùn)動(dòng)。配合傳感器系統(tǒng),機(jī)器人能實(shí)時(shí)感知關(guān)節(jié)狀態(tài)、自身姿態(tài),并接收指令,為學(xué)習(xí)提供基礎(chǔ)。
研究團(tuán)隊(duì)針對(duì)垂直攀爬的特性,提出了接觸引導(dǎo)課程學(xué)習(xí)方法,讓機(jī)器人在墻與地面的弧形連接處學(xué)習(xí)支撐發(fā)力,再逐步過渡到垂直墻壁。同時(shí),在模擬器中設(shè)置多樣場(chǎng)景,增強(qiáng)機(jī)器人的適應(yīng)力。在學(xué)習(xí)過程中,非對(duì)稱策略優(yōu)化了訓(xùn)練效率,評(píng)估者同步掌握更多隱藏參數(shù),更精準(zhǔn)地評(píng)判動(dòng)作合理性。精細(xì)化的獎(jiǎng)勵(lì)機(jī)制則引導(dǎo)機(jī)器人在試錯(cuò)中掌握省力穩(wěn)定的攀爬技巧。
在模擬環(huán)境中,KLEIYN憑借課程學(xué)習(xí)掌握了高效攀爬策略,成功攀爬未經(jīng)過訓(xùn)練的窄墻,證明了課程學(xué)習(xí)的泛化能力。接觸引導(dǎo)課程學(xué)習(xí)的有效性也得到了驗(yàn)證,通過循序漸進(jìn)的課程設(shè)計(jì)提升了學(xué)習(xí)效率。算法與機(jī)械結(jié)構(gòu)的協(xié)同讓攀爬效率倍增,有腰關(guān)節(jié)的機(jī)器人在窄墻上的表現(xiàn)更好,擺動(dòng)階段的反沖速度更顯著。
在真實(shí)世界中,KLEIYN展現(xiàn)了卓越的攀爬能力,在800毫米、900毫米、1000毫米寬的墻壁上穩(wěn)定攀爬,速度遠(yuǎn)超傳統(tǒng)機(jī)器人。面對(duì)干擾,它能快速調(diào)整姿態(tài)重新穩(wěn)定,展現(xiàn)出抗干擾能力。同時(shí),它在臺(tái)階上下行走及不平坦石面的打滑恢復(fù),證明了課程學(xué)習(xí)策略可有效遷移到真實(shí)運(yùn)動(dòng)場(chǎng)景,實(shí)現(xiàn)了攀爬與行走的雙模式整合。