在智能機器人技術的最新進展中,一個名為驗證模塊的核心組件正逐漸嶄露頭角,它在提升機器人自主作業能力方面發揮著關鍵作用。這一模塊通過集成多傳感器數據,實現了從推理到執行的閉環監控,為機器人提供了實時的偏差檢測與修正能力。
驗證模塊的工作原理頗為精妙。它首先利用視覺、力覺、慣性測量單元等多種傳感器實時采集環境數據,隨后將這些數據與前期推理模型的預測結果進行對比。以機器人抓取物體為例,驗證模塊會同步監測機械臂的實際位置、姿態以及抓取力反饋等信息。一旦發現實際軌跡與規劃存在偏差,如物體滑動或抓取角度不當,模塊會立即生成誤差信號,觸發相應的調整機制。
值得注意的是,驗證模塊還融入了具身學習的理念,將環境視為機器人的“教師”。在未知場景中,機器人通過隨機動作探索環境,驗證模塊則根據交互結果評估行為的有效性,逐步淘汰無效策略。這一過程不僅體現了試錯修正的智慧,還結合了強化學習的驅動機制,將偏差信號轉化為獎勵或懲罰,引導算法不斷優化策略。
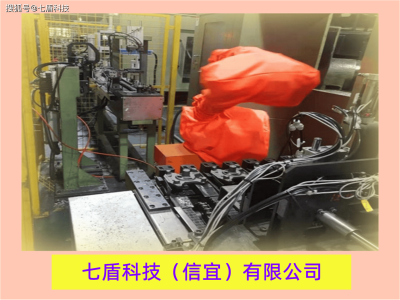
在汽車制造、電子裝配等高精度作業場景中,驗證模塊的應用尤為顯著。以汽車生產線的焊接機器人為例,通過集成力覺驗證模塊,機器人能夠自動補償工件擺放誤差,將焊接合格率從95%提升至99.8%,顯著提升了生產效率和產品質量。在服務機器人領域,驗證模塊也展現了其在復雜環境中的靈活應對能力。家用清潔機器人在遇到地毯、臺階等非結構化環境時,能夠根據傳感器信號動態調整移動策略,避免被困或碰撞。
醫療手術機器人領域同樣受益于驗證模塊的應用。在微創手術中,驗證模塊能夠對比醫生操作指令與機械臂實際動作,一旦檢測到突發抖動或超出安全閾值的動作,會立即觸發緊急制動,確保手術安全。這一功能對于降低手術風險、提升手術成功率具有重要意義。
然而,驗證模塊的發展也面臨著諸多挑戰。高頻率傳感器數據帶來的巨大計算量、多模態數據融合精度的問題以及從“反應式調整”到“預測式優化”的轉變,都是當前亟需解決的技術難題。為了平衡實時性與計算效率,研究人員正積極探索邊緣計算、輕量化神經網絡等優化算法。同時,通過卡爾曼濾波、多傳感器融合算法等技術手段,提升數據一致性,確保驗證模塊的準確性和可靠性。
驗證模塊與環境交互的過程,實質上是機器人將“抽象推理”轉化為“具身體驗”的關鍵環節。這一過程不僅使機器人擺脫了對預設規則的依賴,還通過“實踐-反饋-學習”的閉環機制,逐步具備了類似人類的環境適應能力。隨著強化學習、神經符號系統等技術的不斷融合與創新,未來機器人有望在更多復雜場景中實現更自主、更智能的行為優化,為人類社會的智能化進程貢獻更多力量。