近期,特斯拉在其官方社交媒體平臺上再度強調了視覺處理方案的重要性,并宣稱此方案將使得安全智能的產品更加親民。特斯拉的這一立場,無疑為其在智能駕駛領域的純視覺技術路線再添一把火。
回溯至上個月,特斯拉CEO埃隆·馬斯克通過其個人社交平臺透露,特斯拉即將推出基于純人工智能技術的“通用型全自動駕駛(FSD)解決方案”。這一方案將延續特斯拉自2016年以來堅持的“視覺優先”策略,摒棄激光雷達,僅憑攝像頭和自研芯片便可實現L4至L5級別的自動駕駛。
然而,與特斯拉全力押注純視覺方案形成鮮明對比的是,激光雷達市場正蓬勃發展。據國際市場研究與戰略咨詢機構Yole Group發布的《2025年全球車載激光雷達市場報告》顯示,全球乘用車激光雷達市場正以驚人的速度增長,預計2024年市場規模將同比擴增68%,達到6.92億美元。截至2025年3月底,中國市場已有94款搭載激光雷達的車型上市,數量較上一年度翻倍。
禾賽科技的CEO李一帆在技術開放日上表示,車載激光雷達正逐漸從“可選配置”轉變為“必備安全組件”。同時,經過約8年的努力,激光雷達的成本已大幅下降99.5%,從數千美元降至約200美元。
在智能駕駛輔助領域,激光雷達與純視覺的路線之爭由來已久,至今仍未有定論。無論是僅依賴攝像頭的“純視覺派”,還是采用激光雷達、毫米波雷達和攝像頭相結合的“多傳感器融合派”,這場爭論的本質在于技術理念、成本邏輯與市場策略的深刻博弈,預示著智能駕駛輔助技術路線的競爭將進一步升級。
特斯拉在其聲明中指出,公司的視覺處理方案結合端到端神經網絡架構,已通過數十億真實世界數據樣本的訓練,成功實現了多場景下的安全智能駕駛。特斯拉的這一表態,進一步明確了其在智能駕駛輔助領域的技術選擇與戰略定位。與業內其他依賴多傳感器融合方案的企業不同,特斯拉堅信“先進的技術無需依賴昂貴復雜的傳感器”。
特斯拉的FSD智能駕駛輔助系統是目前世界上唯一采用純視覺方案的系統,甚至摒棄了毫米波雷達,僅依靠攝像頭和AI系統。馬斯克曾表示,自動駕駛汽車應模仿人類司機的駕駛方式,依靠視覺和智力駕駛,特斯拉的純視覺方案正是基于這一理念。
馬斯克認為,道路和交通規則是基于人類視覺設計的,因此純視覺方案最能貼近人類駕駛習慣,是實現完全自動駕駛的“第一性原理”。他多次批評激光雷達是“錯誤的解決方案”,指出其在復雜道路環境中效率低下,而視覺系統結合生物神經網絡才是最優解。特斯拉采用純視覺方案,是為了讓車載計算機更加“專注”,避免冗余數據對軟件產生負面影響。
從技術角度看,純視覺方案基于攝像頭感知系統,通過攝像頭捕捉環境的RGB圖像數據,利用深度學習算法提取語義特征,完成環境感知、識別和決策。這一方案的核心在于以算法為驅動,模擬人類視覺系統理解復雜駕駛場景。
然而,純視覺方案也面臨諸多挑戰。一方面,它依賴算法對場景的高效感知與理解,在惡劣天氣和復雜光照條件下,如何確保可靠性是其核心挑戰之一。另一方面,該方案需要處理大量圖像數據,對自動駕駛系統的數據處理和存儲能力提出了更高要求。
相比之下,國內雖然也有企業宣稱采用純視覺方案,但實際上是“主視覺”方案,除了攝像頭外,仍保留了其他傳感器,只是去除了激光雷達。中國車企更擅長結合中國實際道路環境開發智能駕駛輔助技術,針對“鬼探頭”“加塞”等常見情況,都有針對性的解決方案。
自動駕駛的核心技術包括環境感知、精確定位、路徑規劃和線控執行。在實際駕駛中,自動駕駛汽車需要準確識別周邊環境,尤其是實時動態環境數據。環境感知通過攝像頭、傳感器和雷達對周圍環境進行監控和信息獲取,完整的環境感知方案需要多方信息協調。

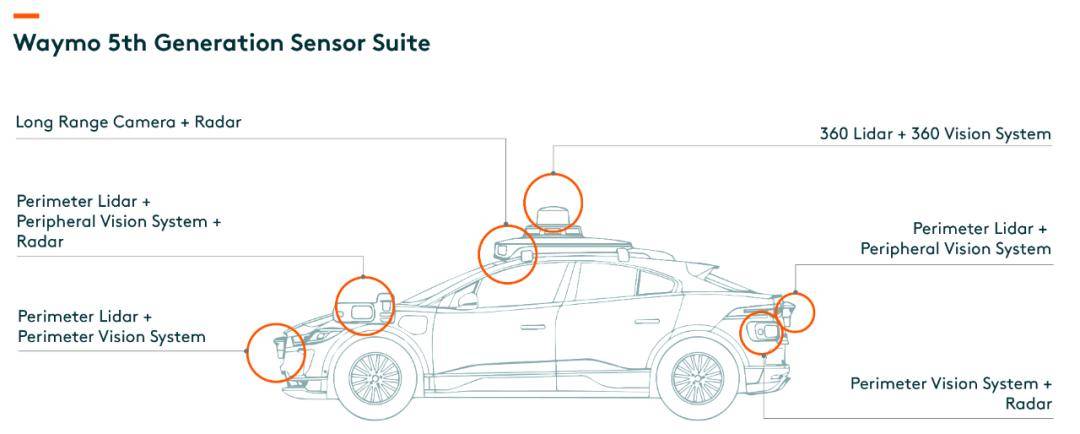
感知系統的實現依賴于傳感器數據采集、特征提取、數據融合和語義分析等技術模塊的協同運作。數據采集是感知系統的起點,通過激光雷達、攝像頭、毫米波雷達和超聲波雷達等傳感器的協作,感知系統能夠覆蓋從遠距離到近距離的全方位感知需求。
激光雷達以其高精度測距能力,能夠精確感知周圍環境中的物體位置、形狀和距離,被廣泛應用于構建環境幾何模型。攝像頭則能捕獲豐富的語義信息,用于識別車道線、交通標志等。毫米波雷達在感知速度和距離信息方面表現優異,而超聲波雷達則更多應用于泊車場景中的障礙物檢測。

為了克服單一傳感器的局限性,多傳感器組合已成為自動駕駛的主流解決方案。激光雷達與攝像頭的融合感知方案,能夠提升全局信息獲取能力,為行駛安全提供多重保障。以華為、理想汽車為代表的企業是激光雷達的堅定支持者。
理想汽車CEO李想在一次對話節目中表示,保留激光雷達是為了安全。他舉例說,在中國深夜駕駛時可能會遇到尾燈損壞的大貨車停在主路上,激光雷達能在200米外發現,而攝像頭在無光環境下可視距離只有100多米。激光雷達能實現更遠距離的探測,對物體的檢測更靈敏,在高速場景下保證更高的剎停速度,在城區里則有效降低誤報率。
特斯拉與國內車企的路線分歧,本質上是“算法驅動”與“硬件驅動”的理念之爭。特斯拉押注于通過海量數據訓練出“全能算法”,實現無雷達的純視覺自動駕駛;而國內車企則選擇用硬件堆砌安全冗余,通過多傳感器互補應對復雜場景。
然而,單一技術的安全威脅在于安全冗余能力不足。視覺可能“看不見”,激光雷達可能“看不懂”。在真實場景中,大霧可能讓視覺系統失效,反光物體可能讓激光雷達誤判。因此,融合感知技術成為解決之道。通過將激光雷達、攝像頭、毫米波雷達等多種傳感器的感知數據進行融合處理,提供更準確、完整的環境信息。
雖然特斯拉不斷為純視覺路線搖旗吶喊,但目前純視覺路線仍未成為智能駕駛的終局。出于安全的考慮,激光雷達還遠未到被淘汰之時。從國內技術能力出發,現階段要實現去激光雷達還有難度。特斯拉之所以捍衛純視覺路線,是基于其在數據、算力與算法三方面的巨量投入。
在考慮成本時,不能僅看硬件成本,還要考慮背后的研發服務和資源投入,即“全成本”。特斯拉構建的門檻和壁壘極高,其他企業難以簡單復制。隨著激光雷達可靠性和成本的改善,越來越多的車企選擇將其應用于高階智能駕駛輔助系統。
智能輔助駕駛正從早期試點邁向規模化普及階段,需要技術創新與用戶體驗的平衡共進。智能輔助駕駛的行業終局尚未明晰,但安全始終是不可逾越的底線。在關乎生命安全的領域,構建可靠的技術體系,讓用戶在每次出行中感受到可信賴的技術守護,才是智能駕駛輔助技術普惠大眾的正確方式。