在智能駕駛領域,一場技術革命正悄然進行。理想、小鵬及元戎啟行等前沿企業,紛紛選擇在車端部署VLA(視覺語言動作模型)技術,以期在智能駕駛領域建立領先地位。
元戎啟行CEO周光在近期的一次發言中預言,VLA技術有望在明年成為行業的共識。無獨有偶,理想汽車創始人李想也表達了類似觀點,他認為AI應能獨立完成專業工作,而VLA戰略正是實現這一目標的關鍵路徑。
VLA與世界模型在理解世界、推理判斷方面有著相似之處,但它們在行動策略上有所不同。世界模型會進行多種可能性的推演,而VLA則直接依據推理結果做出判斷和行動。這種差異使得兩者在實際應用中各具特色。
盡管技術路徑有所不同,但企業在智能駕駛領域的底層思考卻是一致的。隨著車位到車位功能的逐漸普及,企業開始將功能差異化的布局逐漸轉移到安全上。蔚來汽車基于世界模型推出的首個輔助駕駛系統版本,便是在這一背景下應運而生。

2025年被稱為“全民智能駕駛元年”。第一季度,長安、比亞迪、吉利、奇瑞等多家車企宣布將加大智能駕駛技術的普及力度。然而,3月底發生的小米SU7嚴重交通事故,卻給這一熱潮潑了一盆冷水。事故導致三人死亡,并迅速沖上熱搜。事后,工信部召開會議,協會發聲,企業也連夜將“智能駕駛”改為“輔助駕駛”。
這起事故引發了公眾對主動安全功能的廣泛關注。小米汽車官方表示,AEB自動緊急制動功能在某些情況下可能無法響應,如錐桶、水馬、石頭、動物等障礙物。這使得主動安全功能的優劣成為輿論場上的焦點。
相比于行車、泊車功能帶來的直觀震撼,安全功能往往難以被用戶直接感知。然而,在政策、行業發展趨勢以及用戶需求的共同推動下,更多、更好的主動安全功能的普及或將成為必然趨勢。
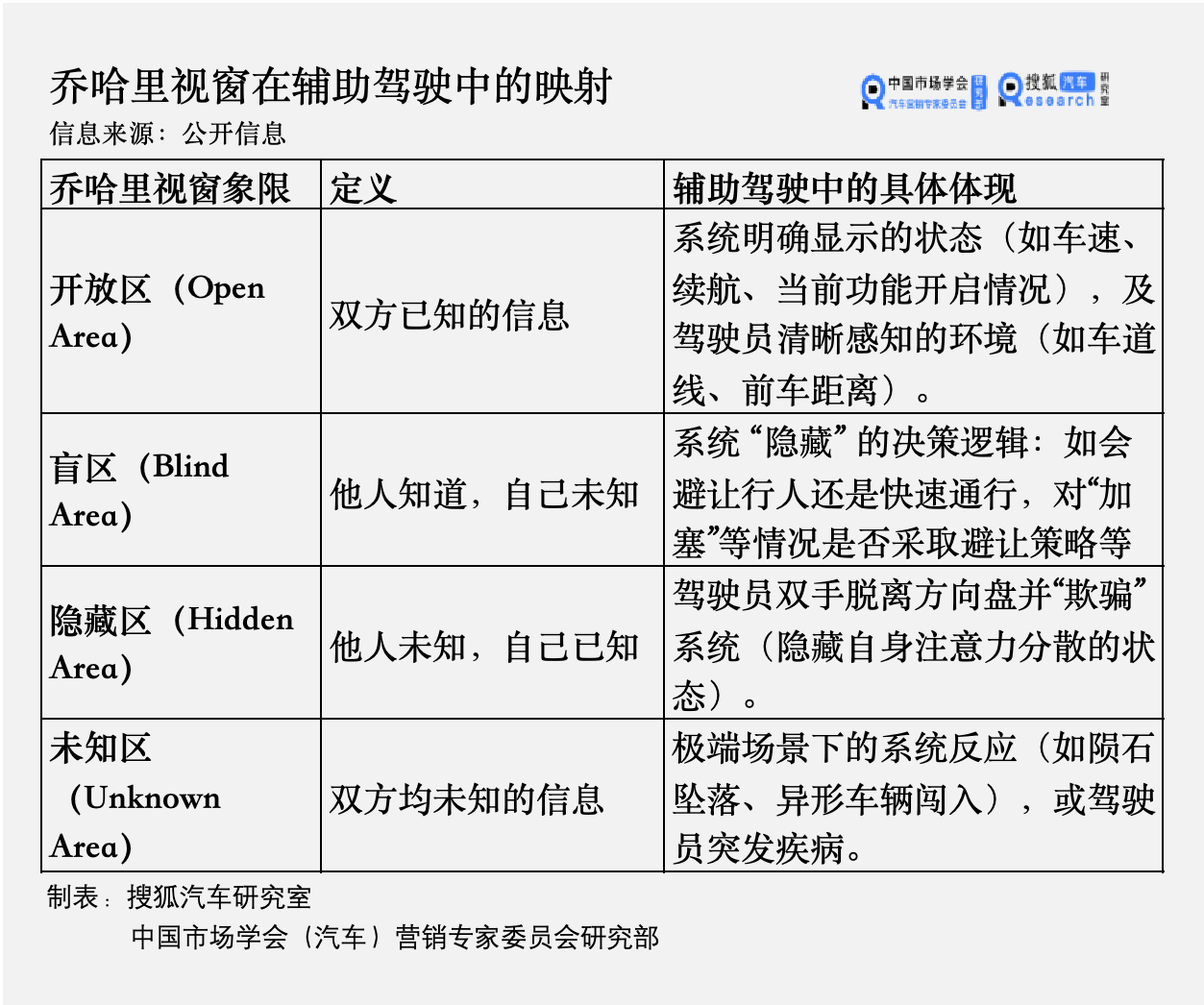
在智能駕駛領域,人機交互帶來的安全焦慮問題同樣不容忽視。L2級的智能駕駛仍處于人機共駕時代,輔助駕駛系統與人類駕駛員需要協作共同駕駛。然而,信息差的存在往往會影響雙方的判斷和決策。
喬哈里視窗理論將信息差劃分為四類,其中“你知道,我不知道”的情況最容易引發焦慮情緒。在輔助駕駛中,車輛知道自己獲取的信息和即將做出的行動,但人類駕駛員卻無法獲取準確信息。這不僅會帶來焦慮情緒,還可能導致駕駛員在緊急情況下做出非最佳決策。
這一問題在純電車型的續航上也已經顯現。駕駛者不清楚車輛的續航能力邊界,往往容易陷入續航焦慮之中。同樣地,在輔助駕駛中,如果人類駕駛員不清楚車輛的推理、決策邏輯,也可能會在緊急情況下產生焦慮情緒或采取不當措施。
蔚來汽車內部人士表示,在體驗世界模型首個版本的過程中,確實存在一些“驚險”的情況。例如,在車輛即將駛出匝道口時加速并入主路、在城區道路行駛中探測出行人后減速但未剎停等。這些情況下,由于車輛并未將自身策略、判斷信息告知駕駛人,駕駛人不清楚車輛的能力邊界,最終導致急剎等不當操作。
然而,蔚來汽車也在努力解決這一問題。例如,在自由交互尋路功能中,車輛會在屏幕上對識別到的文字進行高亮,并以文字的方式呈現車輛尋找出口的思考邏輯以及下一步的行駛動作。這一功能極大地增強了駕駛者的安全感和信任度。
盡管目前這一功能只在停車場場景開放,且行車過程中系統的決策更加復雜,但蔚來汽車仍在不斷探索和完善人機交互技術。在以“安全”為主旋律的技術發展中,人機交互無疑是一個無法忽視的命題。