在2025年張江具身智能開發(fā)者大會的激烈競賽舞臺上,同濟大學具身雙臂操作機器人團隊以驚人的4分14秒成績,在具身工業(yè)場景鏈盒上下料項目中一舉奪魁,刷新了該項目的“張江紀錄”。這一成就不僅彰顯了團隊在速度上的絕對優(yōu)勢,更標志著具身智能技術(shù)在真實工業(yè)場景應用中的一次重大突破。
此次勝利,是同濟大學團隊針對制造業(yè)中最基礎且關(guān)鍵的鏈盒上下料環(huán)節(jié),進行深度技術(shù)研發(fā)的成果展現(xiàn)。鏈盒上下料這一看似簡單的操作,在工廠車間中卻需日復一日地重復進行,對機器人的精度、協(xié)同性和環(huán)境適應能力提出了極高要求。同濟團隊通過技術(shù)創(chuàng)新,成功讓機器人在這一核心任務中展現(xiàn)出超越人工的效率和可靠性。
為了實現(xiàn)這一目標,團隊采用了Intel RealSense D435深度相機結(jié)合視覺SLAM算法,實現(xiàn)了±0.2mm的高精度定位。同時,7自由度仿人機械臂的設計模仿了人類手臂的關(guān)節(jié)結(jié)構(gòu),使得機器人在狹小空間內(nèi)也能完成復雜的姿態(tài)調(diào)整。這一設計不僅追求了外形上的相似,更是基于對工業(yè)場景的深刻理解,充分發(fā)揮了人類工作的靈活性和精準感知優(yōu)勢。
在比賽前夕,團隊遭遇了機械臂軌跡偏差和視覺定位漂移等挑戰(zhàn)。然而,通過連夜優(yōu)化算法參數(shù)和調(diào)整傳感器配置,團隊成功克服了這些難題。相較于其他隊伍,同濟團隊的優(yōu)勢在于其系統(tǒng)性創(chuàng)新:融合激光雷達、IMU等多傳感器數(shù)據(jù)構(gòu)建動態(tài)環(huán)境地圖,通過阻抗控制動態(tài)調(diào)節(jié)抓取力度確保安全,以及AI驅(qū)動自主學習系統(tǒng)顯著提升新任務部署效率。
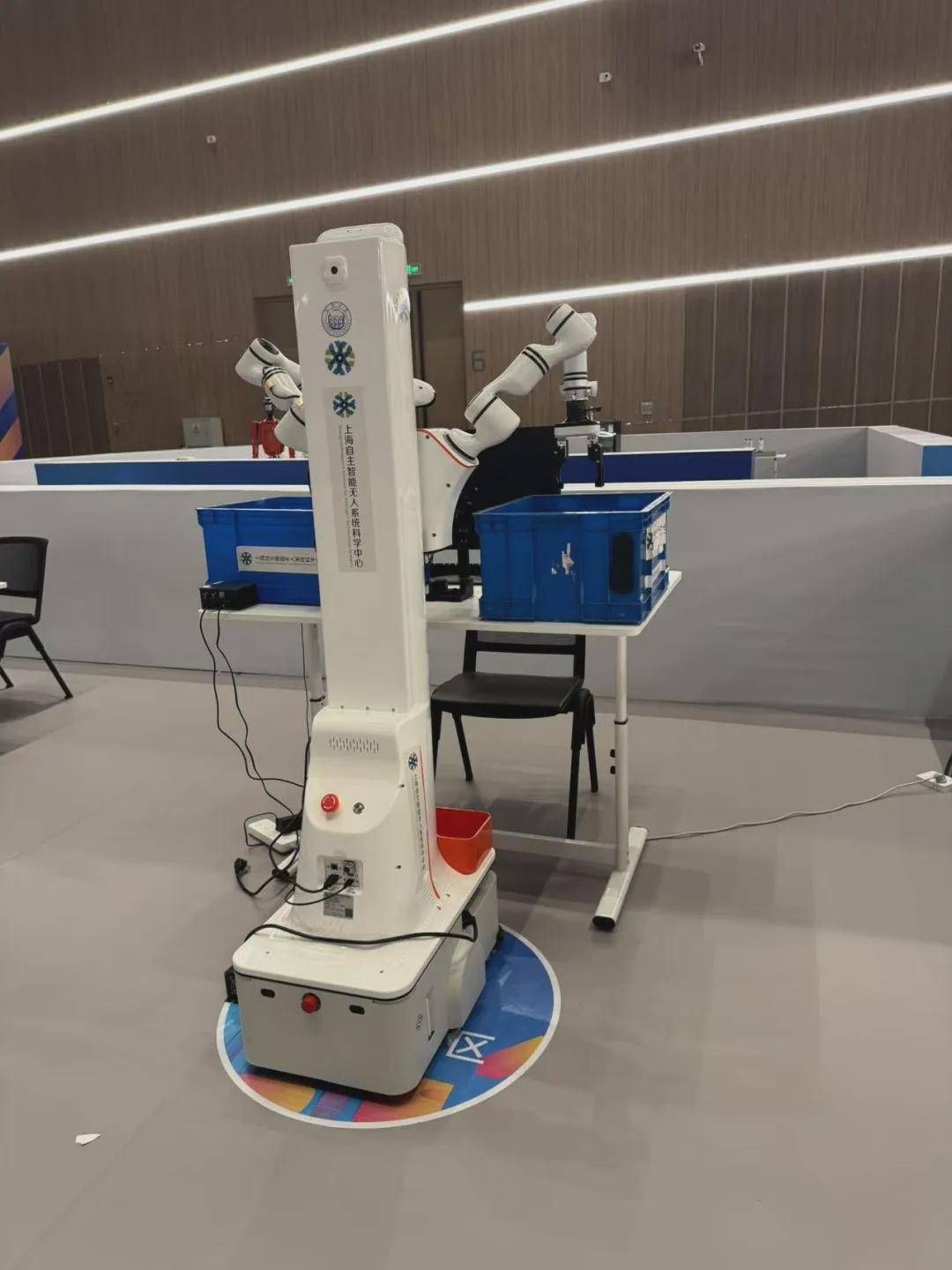
同濟團隊的雙臂機器人系統(tǒng)更是展示了工業(yè)機器人能力邊界的拓展。800mm升降柱設計使得工作范圍達到200-2000mm,有效應對了工廠為提高空間利用率而將料箱疊放多層的現(xiàn)實需求。雙臂協(xié)作采用順序執(zhí)行策略,左臂負責識別、抓取工件并放置到檢測臺,右臂則負責從檢測臺抓取工件運送至目標料箱。未來,團隊還將研究通訊機制,實現(xiàn)雙臂的并行調(diào)度,進一步提升整體效率。
感知系統(tǒng)同樣經(jīng)過精心設計:頭部全局視覺系統(tǒng)結(jié)合頭、左臂、右臂三路深度相機,構(gòu)成多層次感知體系。這一設計確保了機器人在復雜動態(tài)環(huán)境中的高精度視覺感知。同時,動態(tài)避障功能通過環(huán)境建模、虛擬安全邊界設置和實時路徑規(guī)劃實現(xiàn),底盤搭載的激光雷達則確保移動安全,使機器人具備了在非結(jié)構(gòu)化環(huán)境中自主作業(yè)的能力。

同濟團隊的機器人已在合作工廠進行實地測試,并在復雜狹小空間和動態(tài)光照環(huán)境下展現(xiàn)出卓越的性能。團隊通過精確的3D環(huán)境建模和虛擬安全邊界設置,確保機器人在擁擠環(huán)境中安全可靠地執(zhí)行任務。同時,針對車間光照變化對深度相機識別精度的影響,團隊采用軟硬件結(jié)合方案,深度改進算法魯棒性,確保視覺系統(tǒng)在多變光照下的高精度與可靠性。
作為參賽指導教師和領(lǐng)隊,蔣永康老師對張江的創(chuàng)新生態(tài)給予了高度評價。他表示,張江上下游企業(yè)形成的全鏈條產(chǎn)業(yè)生態(tài)非常密集且協(xié)同高效,為同濟團隊的技術(shù)研發(fā)提供了有力支持。同濟大學上海自主智能無人系統(tǒng)科學中心扎根于張江人工智能島核心區(qū),與園區(qū)內(nèi)多家頂尖企業(yè)和研究所建立了深度校企合作項目,這種“樓宇即產(chǎn)線”的協(xié)同模式正成為張江創(chuàng)新生態(tài)的典型特征。