在國內汽車圈,口水戰似乎已成為一種常態,特別是在智能輔助駕駛領域,各大車企紛紛不遺余力地自我標榜,相互貶低,以期在這場技術競賽中脫穎而出。近期,理想與小鵬兩大品牌再度圍繞VLA技術路線展開了激烈的交鋒,為我們提供了一個深入了解其智駕營銷戰的契機。
自動駕駛行業長久以來便充斥著浮夸之風,這股風氣很大程度上可以追溯至馬斯克對FSD技術的過度宣揚。自此之后,國內車企似乎找到了新的營銷靈感,紛紛以特斯拉為標桿,通過夸大其詞的技術宣傳來吸引消費者目光。
2024年,理想與小鵬在端到端技術的營銷上再次狹路相逢。雙方均聲稱自己是全球范圍內僅次于特斯拉,率先實現端到端大模型量產落地的本土車企。這種“世界唯二/全球唯二”的宣傳策略,無疑是在借特斯拉之名,行自我推銷之實。
同年7月,理想汽車宣布推出端到端無圖NOA方案,隨后小鵬汽車CEO何小鵬緊跟步伐,宣布小鵬同樣實現了端到端大模型的量產落地。雙方還就實車數量能否決定端到端方案的性能,以及誰率先部署一段式端到端等問題展開了激烈的爭論,這場口水戰無疑為汽車愛好者們提供了不少茶余飯后的談資。
在中國自動駕駛產業的發展歷程中,理想與小鵬無疑占據了重要地位。2024年,這兩家新勢力車企率先落地了一段式端到端方案,并在2025年爭相訓練和部署基于生成式AI的VLA智駕大模型。然而,由于架構設計、訓練方法、數據配比等方面的差異,兩家車企的VLA大模型也呈現出顯著的不同。
其中,實車部署時是否采用端云結合路線成為了雙方爭論的焦點。小鵬汽車自動駕駛產品高級總監明確表示,所有與控車相關的VLA都必須部署在車端,以避免網絡延遲帶來的安全風險。而理想汽車則采用了端云一體的路線,通過云端基座模型處理復雜任務語音指令。
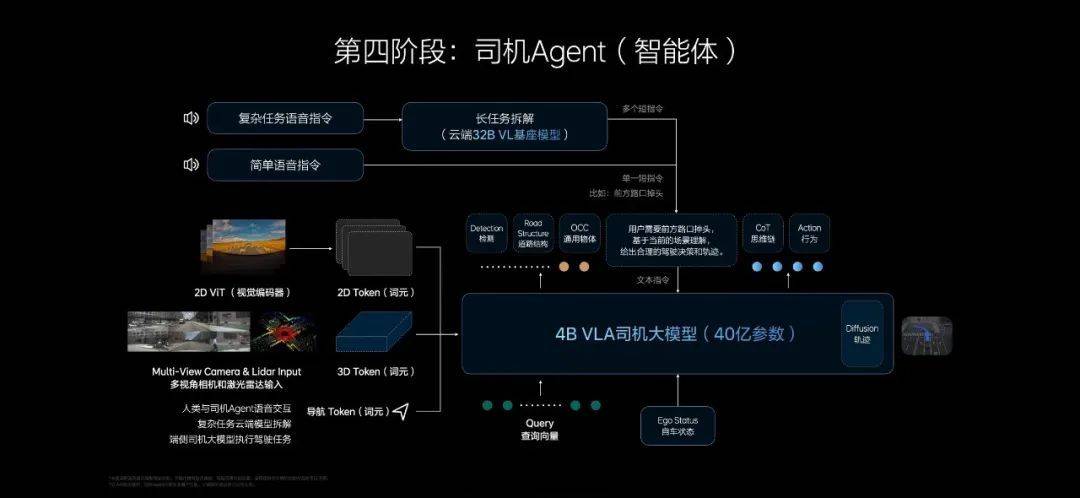
在VLA模型的訓練和推理方面,理想與小鵬同樣采取了不同的策略。小鵬汽車將云端模型工廠劃分為四個車間,依次進行基座模型的預訓練、后訓練、模型蒸餾以及車端部署。而理想汽車則先進行視覺語言基座模型的預訓練,再進行模型蒸餾,最后通過駕駛場景數據進行后訓練和強化學習,并將最終的司機Agent進行端云部署。

兩種路線各有千秋,小鵬的做法更符合智能涌現的規律,能夠大幅提高云端大模型的上限,但訓練成本較高且需要更多算力資源。而理想汽車的路線則能夠彌補蒸餾過程造成的能力損失,且訓練成本低、效率高,但可能不會觸發智能涌現。

在這場技術路線的較量中,誰將更勝一籌,目前尚難定論。但無論如何,理想與小鵬的結合預訓練和強化學習的策略,無疑為行業樹立了新的標桿。至于誰才是行業第一,哪個是更好的技術路線,或許只有等待市場和時間來給出最終的答案。