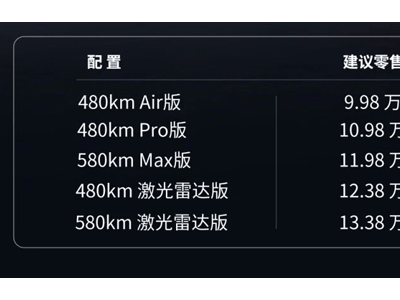
國內具身智能領域迎來重要突破,北京人形機器人創新中心近日宣布開源一系列核心成果,包括國內首個通過具身智能國家標準測試的VLA大模型XR-1,以及配套的數據基礎設施RoboMIND 2.0和ArtVIP最新版本。這一舉措旨在推動具身智能技術向"全自主、實用化"方向邁進,使機器人能夠在真實場景中高效完成多樣化任務。
作為開源項目的核心,VLA模型XR-1聚焦具身小腦能力開發,具備三大技術優勢:其跨數據源學習能力可利用海量人類操作視頻進行訓練,顯著降低數據獲取成本;跨模態對齊技術通過構建視覺與動作的映射關系,實現"所見即所動"的類人反應;跨本體控制能力則支持模型快速適配不同品牌、類型的機器人硬件。這些特性使XR-1成為國內首個實現多場景、多本體、多任務協同的具身智能模型。
支撐XR-1性能突破的關鍵在于創新研發的UVMC(多模態視動統一表征)技術。該技術通過建立視覺信息與動作指令的實時轉換機制,使機器人能夠像人類一樣產生條件反射式的自然反應。在實際測試中,搭載該技術的具身天工2.0機器人展現了卓越的運動控制能力,可完成大幅彎腰下蹲、精準抓取隨機擺放物料箱等復雜動作,甚至能處理倒料等需要多關節協同的操作任務。
配套數據平臺RoboMIND 2.0在原有基礎上實現全面升級。新版本數據集包含超過30萬條機器人操作軌跡,覆蓋工業零件分揀、流水線作業、物理化學實驗、家庭廚房操作、家電交互等11個典型場景,形成工業、商用、家庭三大領域的完整數據體系。值得關注的是,平臺新增1.2萬條帶觸覺反饋的操作數據,為訓練具備物理感知能力的VTLA、MLA模型提供支持,同時開源的ArtVIP仿真數據集可服務于機器人大小腦模型的聯合訓練。
在硬件適配性方面,XR-1展現出強大的泛化能力。通過跨本體控制技術,該模型可快速兼容不同構型的機器人本體,實現運動控制參數的自動匹配。這種特性不僅降低了模型部署門檻,更為具身智能技術在倉儲物流、智能制造、家庭服務等多個領域的規模化應用奠定了基礎。隨著開源生態的完善,國內具身智能產業有望進入快速發展期。