清晨的高速公路上,一場驚險的危機被智能駕駛系統悄然化解。當大多數人還在沉睡時,一輛理想汽車正以120公里的時速在連霍高速上平穩(wěn)行駛。突然,車輛在毫無預兆的情況下自動減速,駕駛員本能地踩下剎車,這才發(fā)現前方百米處的道路中央竟橫躺著兩輛事故車輛。
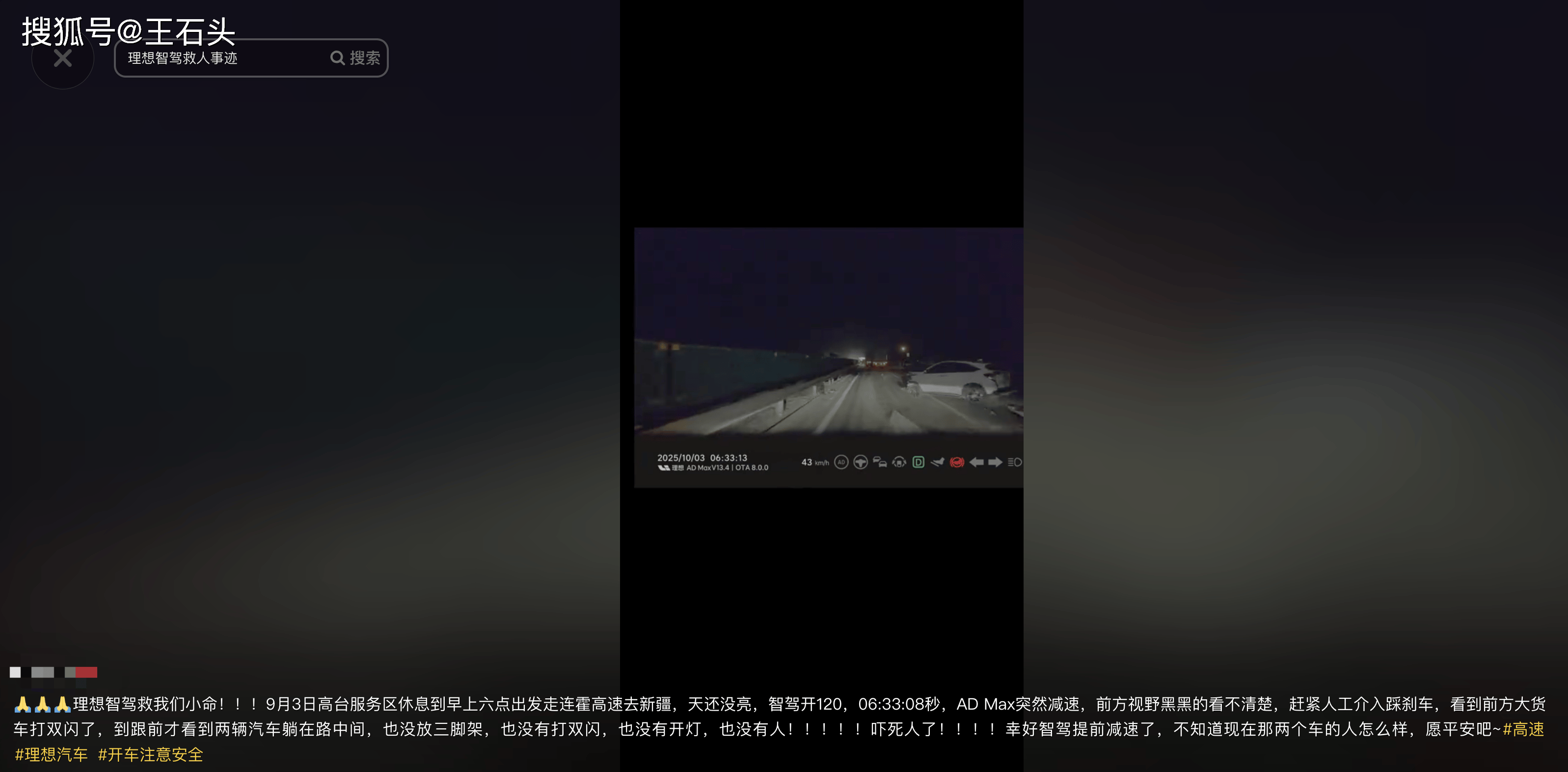
這輛搭載AD Max智能駕駛系統的理想汽車,之所以能在黑暗中提前感知危險,得益于其配備的激光雷達與毫米波雷達組合。在黎明前的低能見度環(huán)境下,這套系統在200米外就探測到了靜止的障礙物,而人類駕駛員的肉眼此時幾乎無法看清前方路況。這種超越人類感官的探測能力,正是智能駕駛技術最核心的安全價值。
事件發(fā)生時的具體數據令人震撼:系統在06:33:08開始自動減速,此時車輛距離障礙物尚有相當距離。若換成純人工駕駛,在120公里時速下,駕駛員從發(fā)現障礙到做出反應的時間往往不足3秒,而理想AD Max系統通過多傳感器融合技術,將反應時間壓縮至毫秒級。這種技術優(yōu)勢在低光照環(huán)境中尤為顯著——即便在白天,人類駕駛員也很難在如此距離發(fā)現靜止車輛。
該事件經網絡傳播后引發(fā)廣泛討論。有網友指出,若沒有智能駕駛系統的介入,以當時的車速發(fā)生碰撞,極可能造成人員傷亡。但技術專家同時強調,盡管此次AD Max系統表現出色,現階段的智能駕駛仍屬于輔助性質。理想車主在系統預警后立即采取人工制動,這個細節(jié)暴露出當前技術的重要邊界:智能系統需要人類駕駛員的持續(xù)監(jiān)督。

從技術原理看,智能駕駛系統通過攝像頭、雷達等設備構建的感知網絡,確實在特定場景下超越了人類感官。毫米波雷達能穿透霧氣,激光雷達可精確建模三維空間,這些特性使系統在黑暗、雨雪等惡劣環(huán)境中保持穩(wěn)定性能。但現階段技術仍存在局限,比如對復雜交通場景的判斷、突發(fā)狀況的處理等,都需要人類駕駛員的最終決策。
這起事件完美詮釋了智能駕駛的"副駕"定位。它不會取代駕駛員,而是在關鍵時刻提供安全冗余。當系統檢測到風險時,會通過減速、警示等方式提醒駕駛員;當系統處理能力達到極限時,則需要人類及時接管。這種人機協作的模式,既發(fā)揮了機器的精準與快速,又保留了人類對復雜場景的判斷能力。
理想車主的經歷揭示了一個重要真相:最理想的安全狀態(tài)不是系統完全自主處理危機,而是人機協同形成雙重保障。系統用技術彌補人類感官的不足,人類用判斷力彌補機器的局限。這種互補關系,或許正是智能駕駛技術最有溫度的呈現方式——它不是冰冷的機器替代,而是可靠的伙伴守護。