在自動駕駛領域的激烈競爭中,小鵬汽車正通過一條獨特的路徑,推動自動駕駛技術的飛躍。小鵬汽車自動駕駛副總裁李力耘在最近的一次技術溝通會上,分享了公司如何通過云端大模型與強化學習的結合,為自動駕駛技術注入新的活力。
李力耘指出,過去自動駕駛領域流行的端到端訓練模式,雖然在一定程度上提升了智駕系統的能力,但其局限性也顯而易見。他解釋說,端到端模型的核心在于保持信息無損和降低車輛延時,從而讓自動駕駛更加敏捷、高效和擬人。然而,這種模型的學習上限僅僅是接近人類駕駛水平,面對極端場景時,往往力不從心。
為了突破這一瓶頸,小鵬汽車決定跳出車端思維的局限,采用云端大模型蒸餾并輔以強化學習的方式。李力耘強調,自動駕駛技術的真正突破,必須超越車端芯片算力的限制,用更大的模型和更海量的數據,去大道至簡地解決駕駛問題。

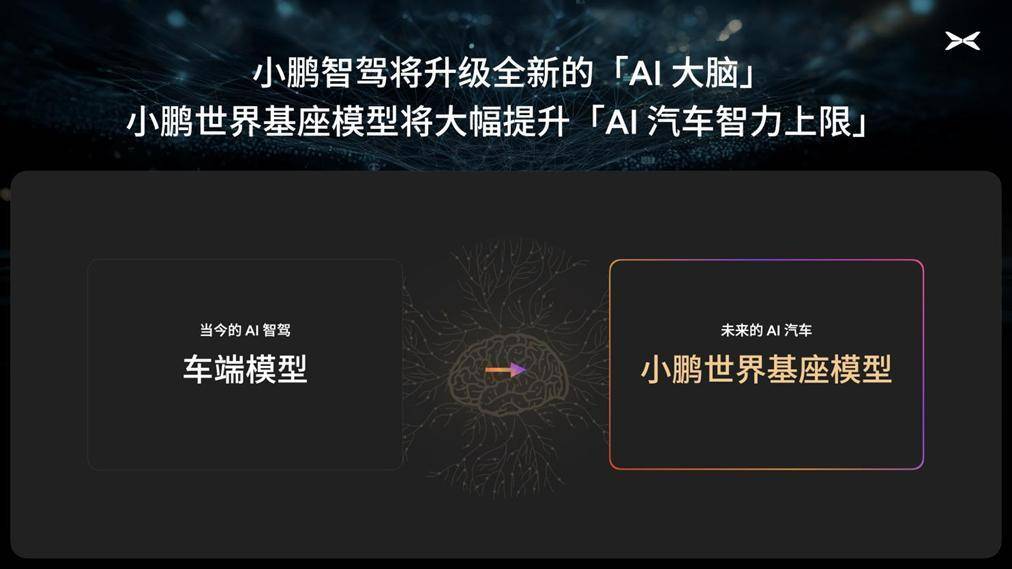
為此,小鵬汽車首次披露了正在研發的720億參數的超大規模自動駕駛大模型——“小鵬世界基座模型”。這一模型將作為自動駕駛技術的核心,通過云端蒸餾的方式,將大模型的能力傳輸到車端,為“AI汽車”配備全新的大腦。
為了實現這一目標,小鵬汽車在算力優化方面也做出了巨大投入。從2024年開始,小鵬汽車搭建了AI基礎設施(AI Infra),目前已建立起萬卡規模的智能算力集群,是國內汽車行業最大的自動駕駛算力集群之一。算力儲備達到10EFLOPS,集群利用率常年高達90%以上,高峰時期的運行效率甚至達到98%。
在云端大模型的基礎上,小鵬汽車還引入了知識的蒸餾和強化學習兩個關鍵技術。知識的蒸餾是先讓云端大模型擁有深度思考(CoT思維鏈)的能力,然后再將這些能力蒸餾到車端模型上。通過這一過程,車端模型能夠具備更強的泛化能力,應對更多復雜場景。
強化學習則用于進一步提升智駕大模型的上限,使其在某些場景下能夠超越人類駕駛水平。小鵬汽車選擇從設計獎勵函數、獎勵模型和世界模型三個方面入手,搭建整個獎勵機制。通過這一機制,智駕模型能夠獲得更連續、更泛化、更多維的獎勵信息,從而不斷優化自身的駕駛行為。
在問答環節,李力耘和小鵬汽車自動駕駛產品高級總監袁婷婷回答了媒體和觀眾的提問。他們表示,小鵬汽車的AI模型開發與特斯拉在某些方面有相似之處,但也有很多不同之處。特別是在云端基座模型方面,小鵬汽車更注重模型的全面性和與物理世界的交互能力。
他們還透露,小鵬汽車的云端基座模型訓練方式、架構和性能表現都與眾不同。目前,他們正在訓練的模型已經達到了720億參數,訓練數據量也達到了行業領先水平。這些優勢將轉化為模型性能上的巨大提升。
對于安全問題,李力耘和袁婷婷都表示非常重視。他們認為,安全是自動駕駛技術的生命線,必須確保在任何情況下都能保證乘客和行人的安全。為此,他們正在通過優化傳感器覆蓋、提升大腦智能水平和優化身手反應速度等方面努力提升安全性。
在談到自研基座模型的必要性時,袁婷婷表示,自動駕駛技術的復雜性要求必須使用LLM作為骨干,并結合大量現實世界數據進行訓練。小鵬汽車通過自研基座模型,能夠更好地理解和應對物理世界的復雜性,從而提升自動駕駛技術的整體性能。
最后,袁婷婷還表示,小鵬汽車在AI開源浪潮中受益良多,并對未來的發展持開放態度。他們期待有一天能夠通過開放的方式,為行業和世界提供一些反饋和貢獻。