在2025外灘大會圓桌論壇上,宇樹科技創始人王興興拋出引發行業熱議的觀點:當前機器人發展的核心瓶頸并非硬件,而是AI大模型的能力局限。這位深耕機器人領域多年的創業者指出,盡管硬件技術已足夠支撐一兩年使用,但AI模型在多模態融合、復雜任務處理等關鍵環節仍存在顯著短板。
王興興以機器人靈巧手控制為例,揭示當前AI模型在硬件協同層面的困境。雖然純語言或視頻模型已展現出強大能力,但將語言指令轉化為精準的機械操作仍面臨挑戰。這種"知行脫節"的現象,在家庭服務場景中尤為突出——當用戶要求機器人尋找"可能放在鞋柜或沙發下的昨日快遞"時,系統需要同時處理時間定位、空間推理、物體識別等多重信息,而現有模型尚無法完成這種復雜決策。
行業觀察顯示,大模型發展正陷入"規模陷阱"。參數規模從億級躍升至萬億級的過程中,訓練成本呈指數級增長,但實際應用效果提升卻逐漸放緩。某知名實驗室的數據表明,將模型參數擴大10倍僅能帶來3%的任務準確率提升,而推理延遲卻增加40%。這種"高投入低回報"的現狀,迫使業界重新思考技術發展路徑。
具身智能領域的突破障礙更為明顯。要實現真正的家務自動化,機器人需要具備跨模態感知、常識推理、應急處理等綜合能力。當前模型在處理"根據家庭成員偏好調整晚餐菜單"這類任務時,往往因缺乏生活常識積累而表現拙劣。某品牌家務機器人雖能完成掃地、擦窗等標準化操作,但在處理打翻的液體或突發客人到訪等場景時,仍需人工介入。
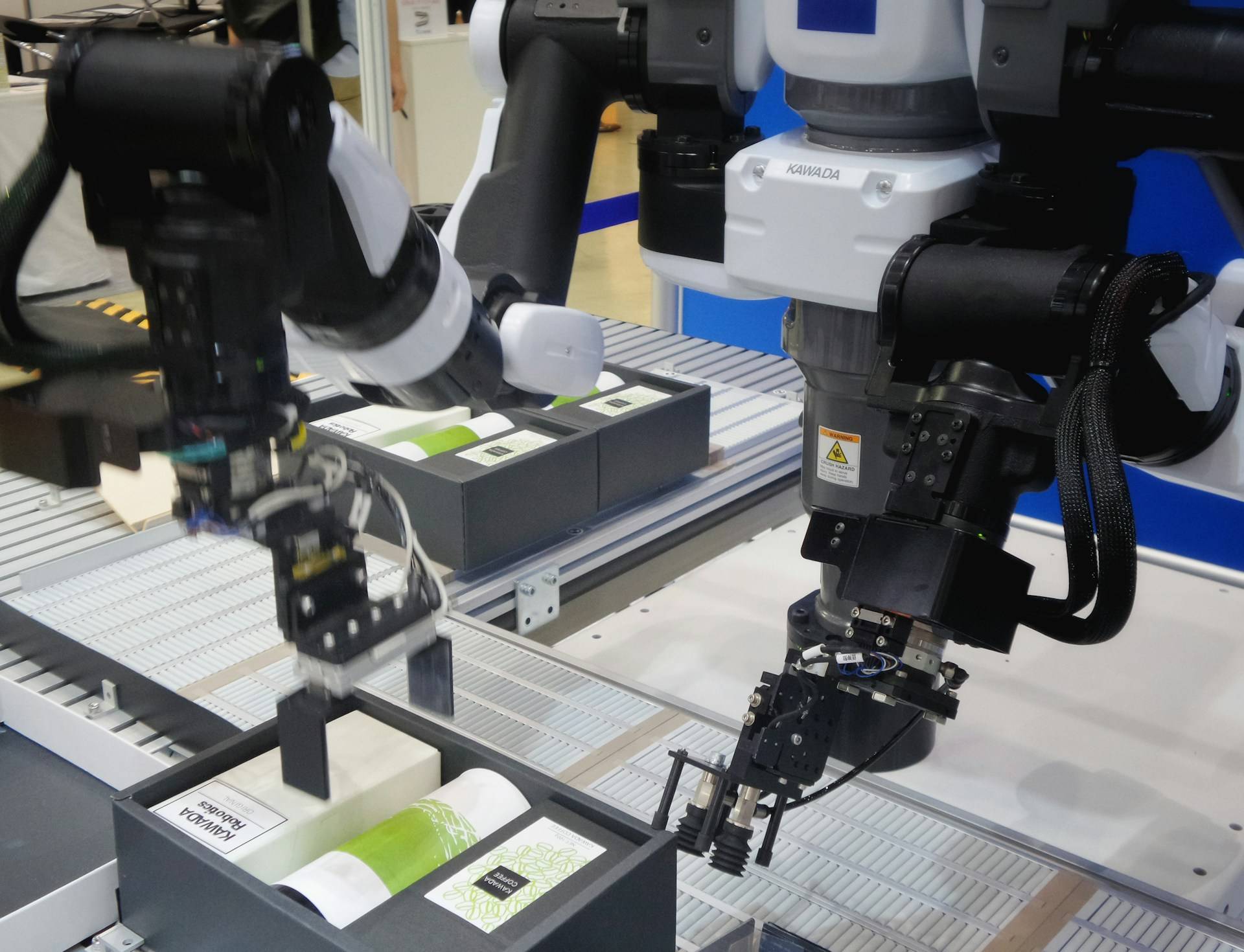
技術專家指出,大模型與機器人硬件的融合存在"感知-決策-執行"的斷層。傳感器收集的海量數據在模型處理環節常出現信息衰減,而決策指令轉化為機械動作時又存在精度損失。某工業機器人企業的測試數據顯示,在復雜裝配任務中,AI決策導致的操作誤差比人工控制高出27%,這直接制約了機器人在高精度場景的應用。
這種技術局限正在重塑行業認知。王興興建議開發者轉變思維模式:"不應將AI視為簡單工具,而要構建能理解物理世界規律的智能體。"他鼓勵年輕開發者突破傳統框架,探索模型與硬件的深度協同方案。事實上,已有研究團隊嘗試將機器人運動數據直接融入模型訓練,使系統在模擬環境中完成數百萬次操作學習,這種"具身訓練"方式使機械臂的抓取成功率提升了41%。
市場反饋印證了技術瓶頸的存在。某咨詢機構調查顯示,73%的工業用戶認為當前機器人系統"不夠智能",主要問題集中在自適應能力不足。而在消費級市場,能完成簡單對話的機器人產品退貨率高達35%,用戶抱怨其"無法理解真實需求"。這些數據反映出,AI模型的能力邊界已成為制約機器人產業升級的關鍵因素。